農業用直進ガイダンス

mnl_t
@mnlt18
作品ページ

--- # GUIプログラムに進化 reTerminal のWikiにあったLVGL(Light and Versatile Graphics Library)を使ってアナログメーター風に表示できるようになりました#QGIS のTemporal Controllerを使ってタイムラプス的作業動画が出来ました。https://t.co/iClAGMTtWa pic.twitter.com/Jzsq1ouuCw
— mnl🌔t (@mnlt18) December 2, 2020
作業中はこんなかんじ
— mnl_t (@mnlt18) January 7, 2022
1cm ごとに振れても±50cm まで表示される pic.twitter.com/PyeUQC4YO6
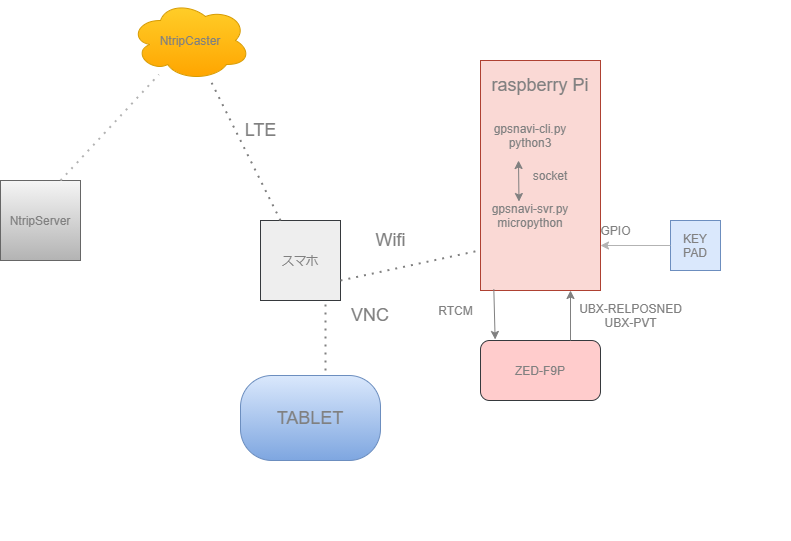
GUI とCUI pic.twitter.com/IDT3JV0tBY
— mnl🌒t (@mnlt18) October 25, 2022
アナログメーターは見やすい ヌルヌル動くよ pic.twitter.com/7ME5CfLn72
— mnl_t (@mnlt18) December 19, 2021