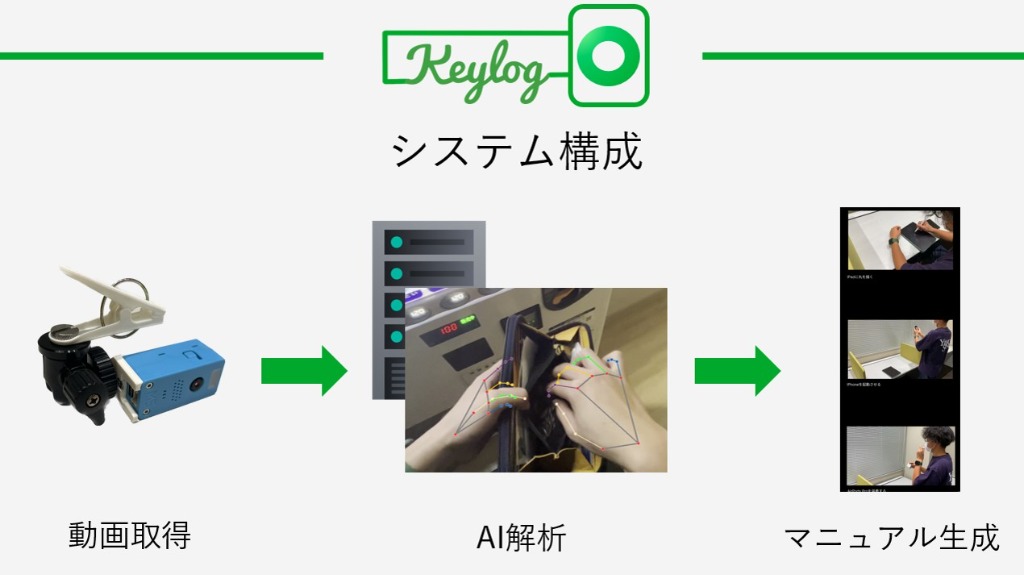
Key-log 自動マニュアル作成サービス
メンバー
Shunsuke
@hiraga118
mii
@mim_ele_
shinouta
@sh____ino
awaawa
@awaawa
作品ページ