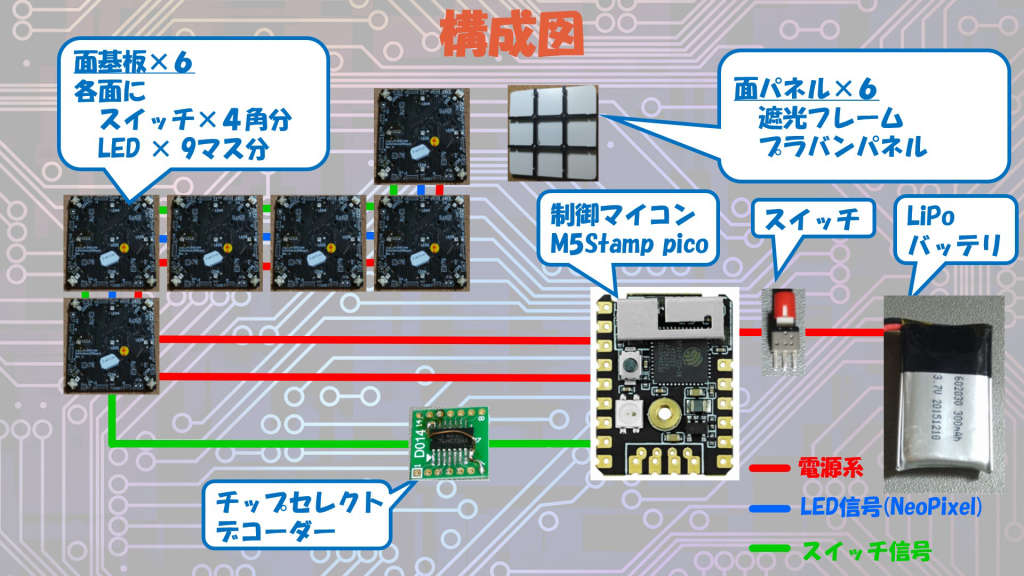
デジタルなルービックキューブ
メンバー
TakSan
@taksan
作品ページ