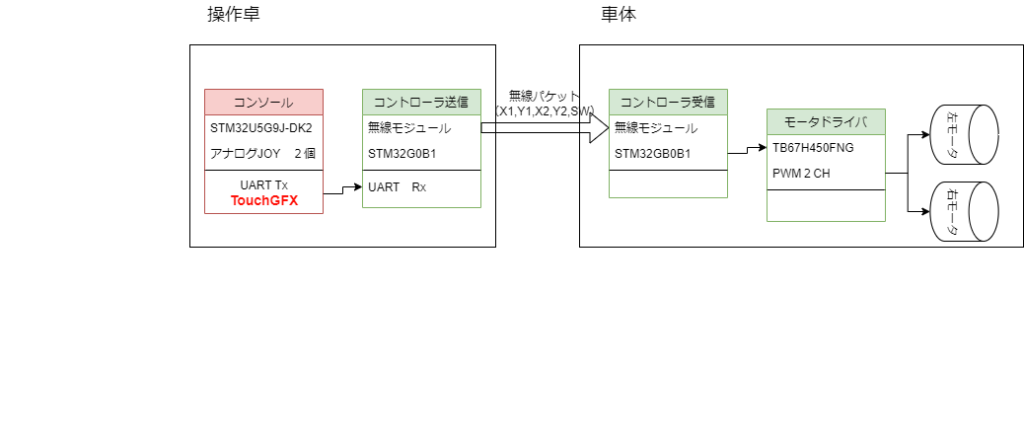
車体操縦のコンソール
メンバー
KWMR
@kwmr2024
作品ページ