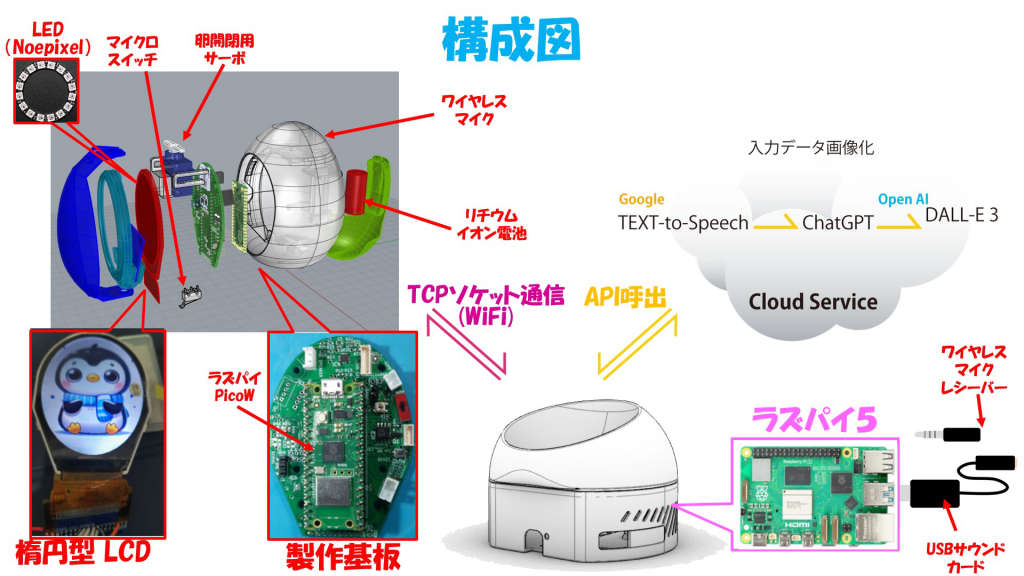
デジたま2 the AI
卵育て隊 the 2nd!
TakSan
@taksan
nakako
@nakako

akitam
@egg_akitam
Kuta
@kuta_2024

S.Shimizu
@gesho_a01
作品ページ