2件

テンプラー筋電位車いす5 ― 咬むだけで操作できる電動車いすと、オート走行+LiDAR安全制御 ―
側頭筋の筋電位で電動車いすを操作する「テンプラー筋電位車いす」は、安全のため噛み続ける必要があり長時間操作が課題でした。本作では入力保持と安全停止を導入し、負担を減らしながら安全な操作を実現します。
開発中
435
12
0
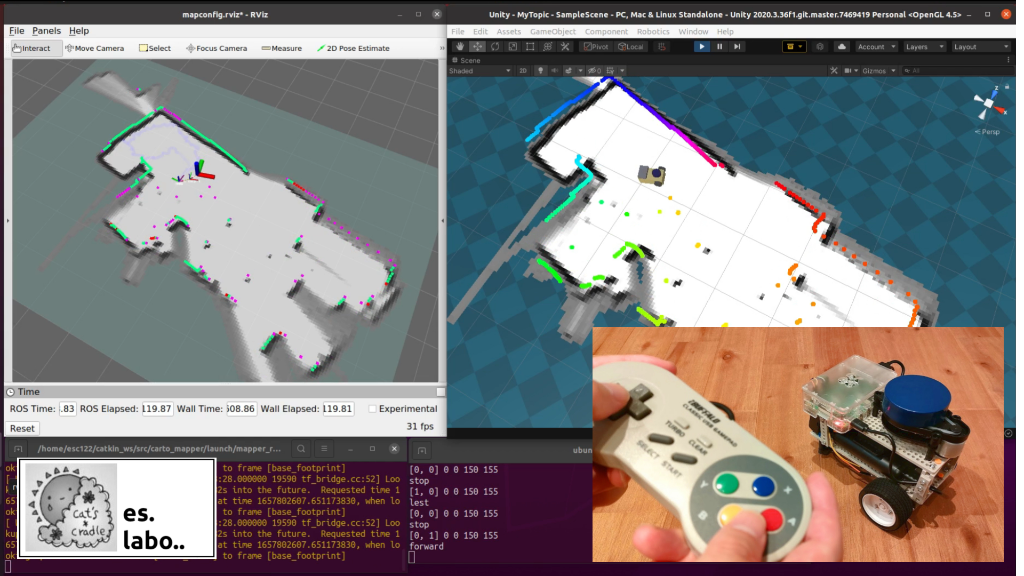
Raspberry Piロボットカー作成(遠隔操作・自動走行・SLAM・Unity同期)
Raspberry Piのモーターを別PCから遠隔操作・自動走行します。LiDARセンサー取付けてSLAM(地図作成・自己位置推定)し、Unityでオブジェクトを同期。データのやり取りはROSで実行。
開発中
18736
16
0
