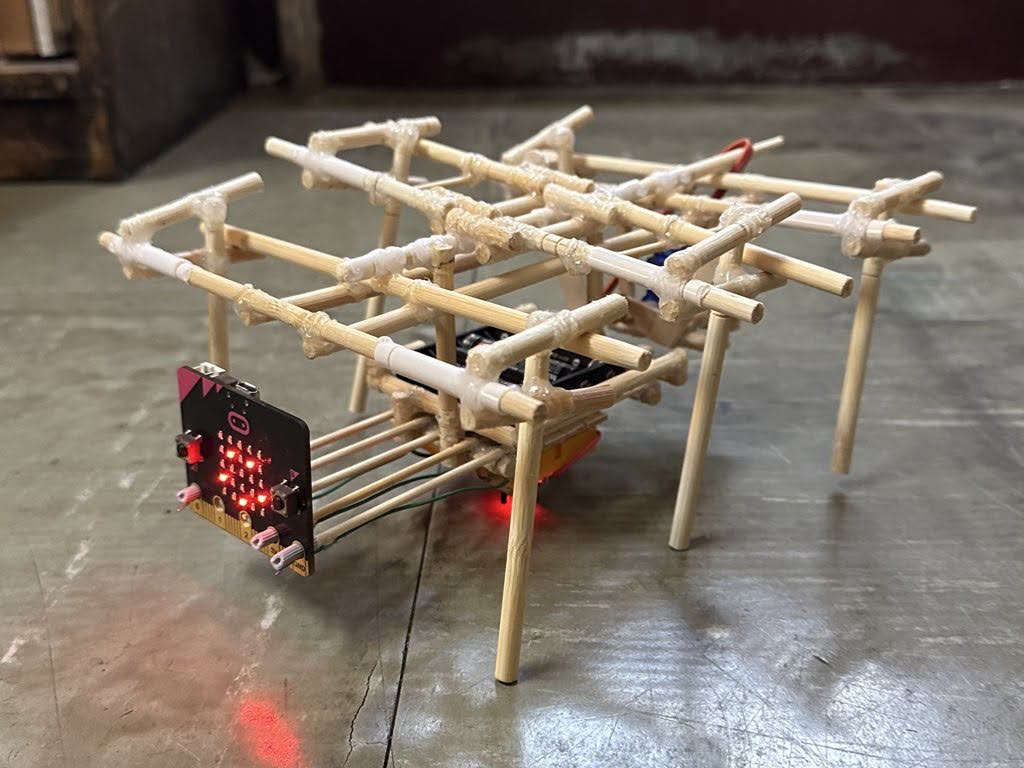
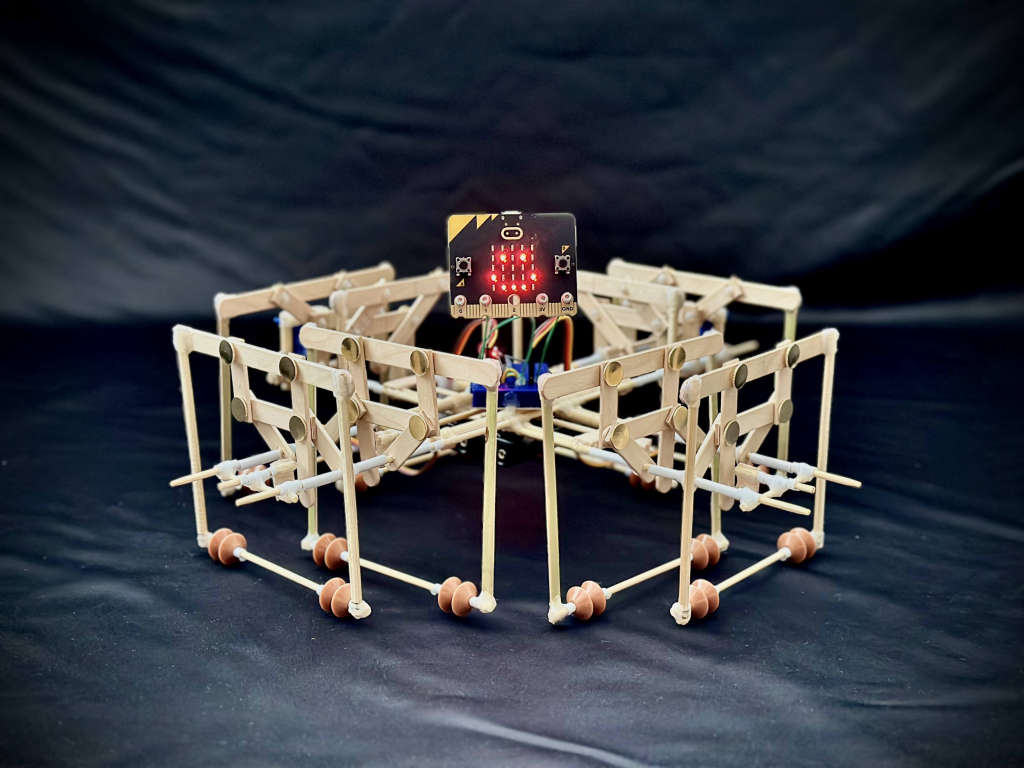
激安!!シングルサーボリモコン多脚ロボ
完成
© CC BY 4+
1346
歩く! 曲がる! でもサーボは1つだけ!?驚異の6脚歩行メカニズム!micro:bitで激安リモコン多脚ロボ爆誕!!!

- 動画
-
- 開発素材
-
デバイス
ツール
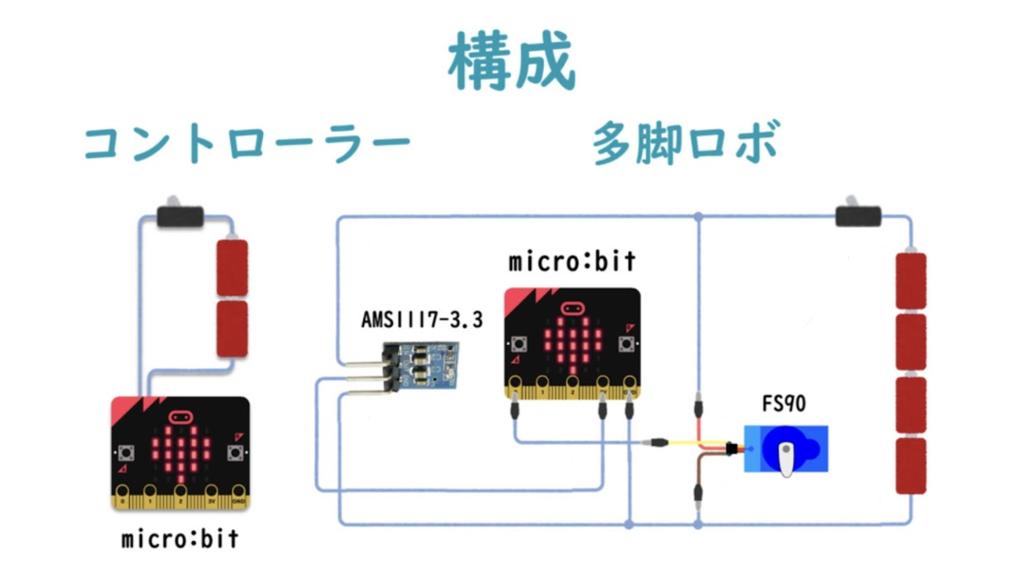
- システム構成
-
- ストーリー
-
- メンバー
-
-

- 片山 均@八幡浜の三瀬医院 @katabomb2
-
- 全部
-
- 関連リンク
-

-
-
- 同じニオイがする作品
-
-
 BDXドロイド(廉価版) / BDX Droid (Budget Version)
BDXドロイド(廉価版) / BDX Droid (Budget Version)
-
 ウッドスタックちゃん
ウッドスタックちゃん
-
 M5StickCとサーボモーター1個でちょっと大きな多脚歩行ロボット
M5StickCとサーボモーター1個でちょっと大きな多脚歩行ロボット
-
 チェビシェフ横すべり脚で全方向移動ロボ
チェビシェフ横すべり脚で全方向移動ロボ
-
Proto lovers ♥


