Walking Helper
開発中
© CC BY 4+
539
障害物に接近すると、その方向と距離を振動を介して通知するデバイス。
センサー部にはLiderセンサを使用してあり、全方位での感知ができるようになっている。


- 動画
-
- 開発素材
-
デバイス
ガジェット
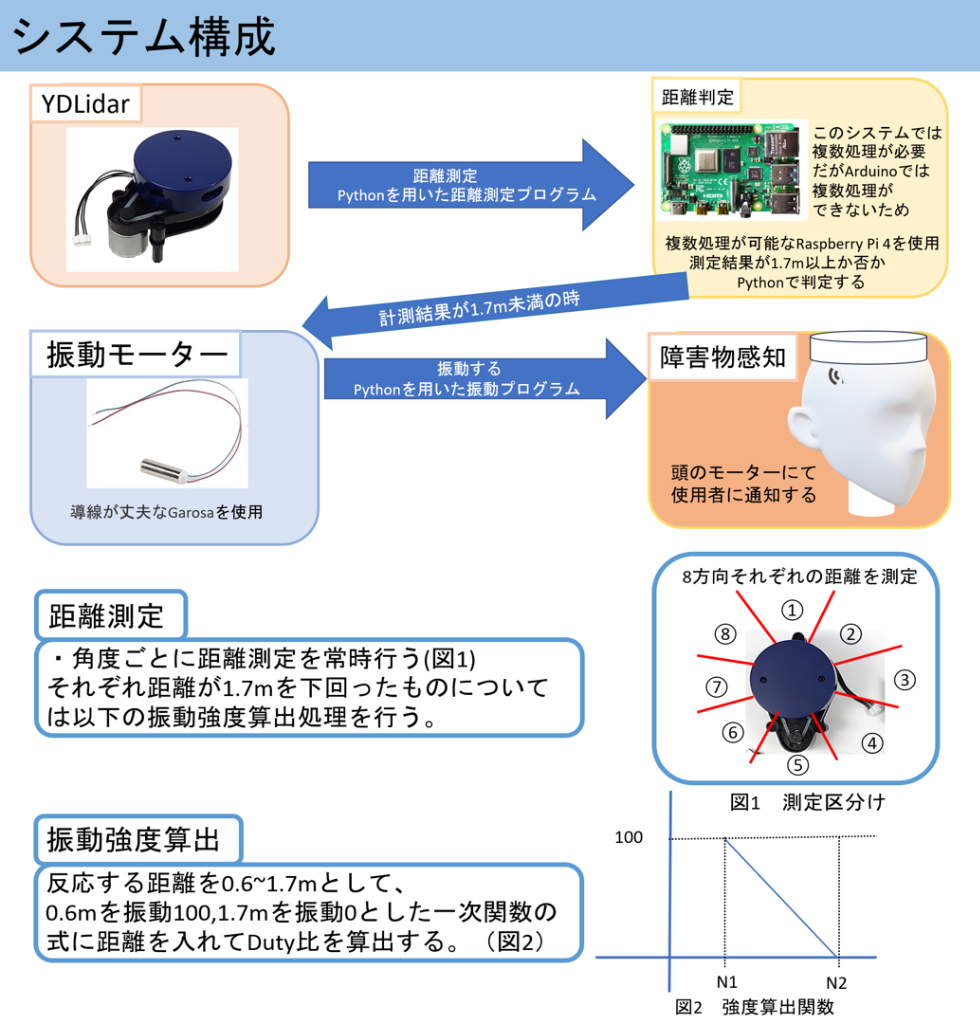
- システム構成
-
- ストーリー
-
- メンバー
-
ぷろんこ株式会社
-
- 宮原友哉 @takanariceball
-
-
- 大竹響己 @torota3noda
-
-
- さらだ @salad55
-
-
- 同じニオイがする作品
-
-
 DIY可能な地すべり警報システム
DIY可能な地すべり警報システム
-
 reNavigator: GPSナビ+Groveセンサ+AI機能拡張モジュール
reNavigator: GPSナビ+Groveセンサ+AI機能拡張モジュール
-
 アウトドア用バックパック装着型スマートアームデバイス PROJECT TRIMANX
アウトドア用バックパック装着型スマートアームデバイス PROJECT TRIMANX
-
 Walky
Walky
-
Proto lovers ♥




YouTubeで紹介させていただきました!
https://youtube.com/live/0c_ImYaSzr8