Printable_Robot_ARM
完成
© CC BY 4+
545
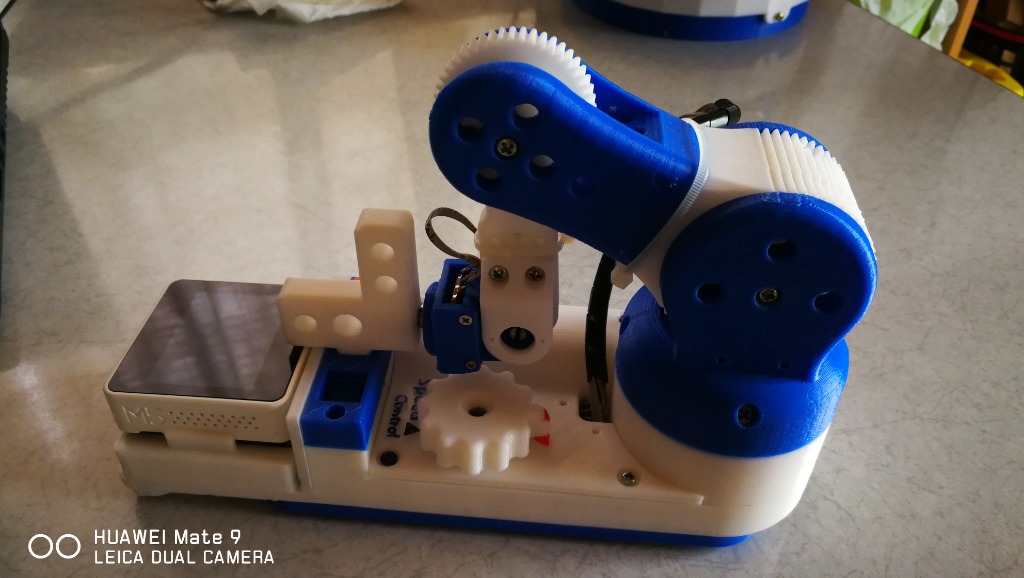
ロボットアームを マスタースレーブで動かしたかったので 作ってみた。
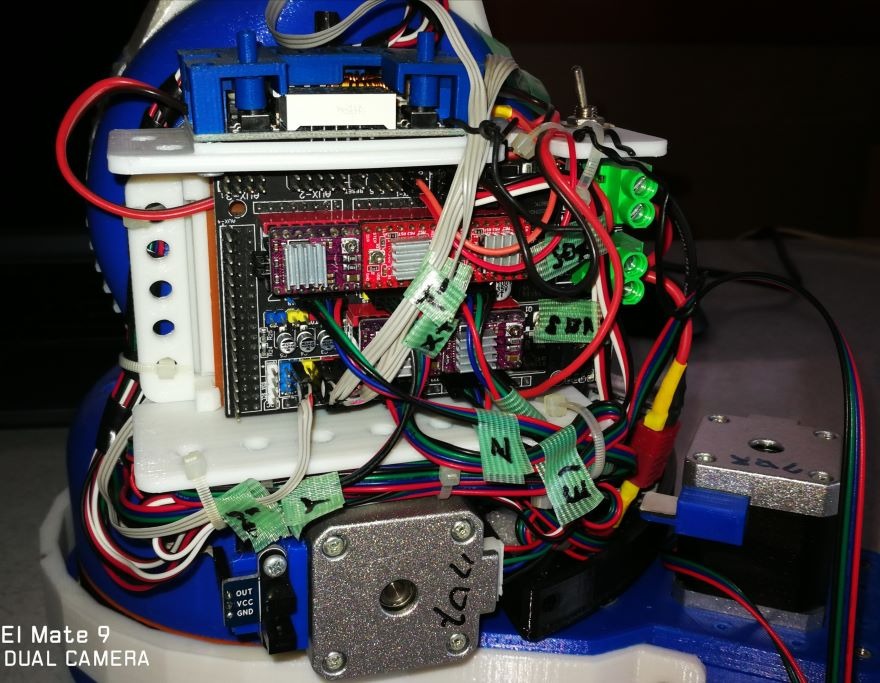
操作側にM5Stack Core2、ARM側は RAMPS+ESP32(GRBL)とし
Bluetooth接続にて動作している。



- 動画
-
- 開発素材
-
API
- システム構成
-
- メンバー
-
-
- mor6 @gsr_mor
-
-
- 関連イベント
-
-
 M5Stack Japan Creativity Contest 20222022-07-15 開催
M5Stack Japan Creativity Contest 20222022-07-15 開催
-
- 同じニオイがする作品
-
-
 ATOM Babies: てのひらに乗るかわいいいきもの
ATOM Babies: てのひらに乗るかわいいいきもの
-
 電脳ネコの手(電脳カチューシャプロジェクト2)
電脳ネコの手(電脳カチューシャプロジェクト2)
-
 M5swarm
M5swarm
-
 世界最小クラス? 指乗りサイズ マイクロロボット
世界最小クラス? 指乗りサイズ マイクロロボット
-
Proto lovers ♥