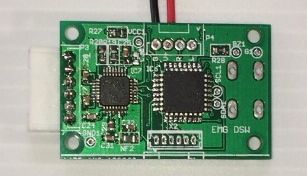
テンプラー筋電車いす
完成
© CC BY 4+
680


- 動画
-
- ストーリー
-
- メンバー
-
Assistech Design Lab
-

- 杉本義己 @naranavi
-
- 組み込みシステム、筋電アンプ
-
- 同じニオイがする作品
-
-
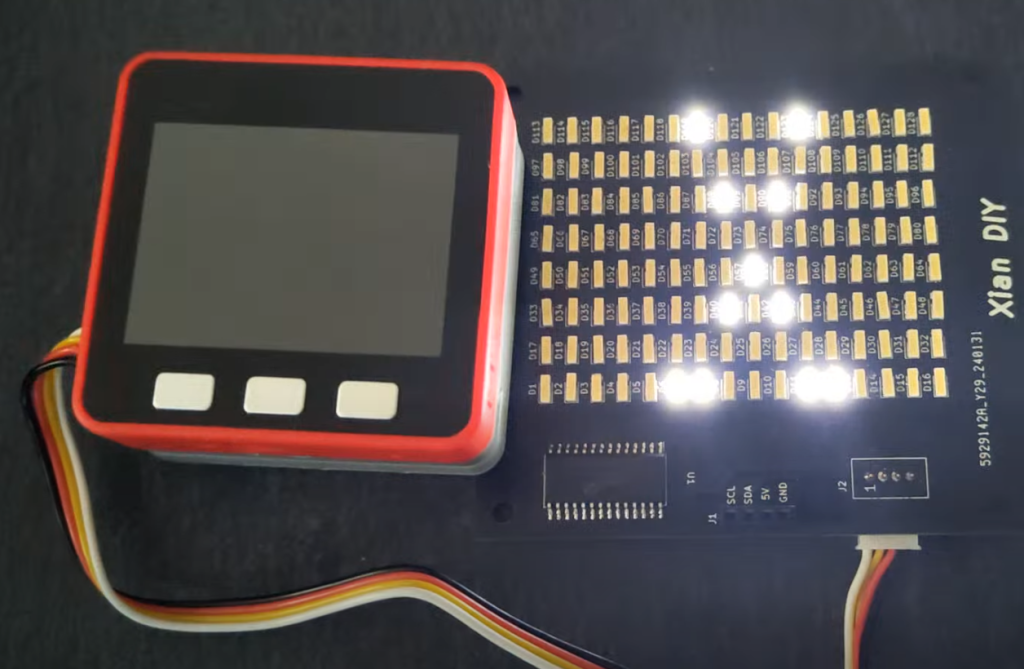 LEDマトリクスボードを自作してM5Stackで制御してみた
LEDマトリクスボードを自作してM5Stackで制御してみた
-
 キャンプ感あふれるお天気グッズ「CAMP-CAN」by M5StickC PLus
キャンプ感あふれるお天気グッズ「CAMP-CAN」by M5StickC PLus
-
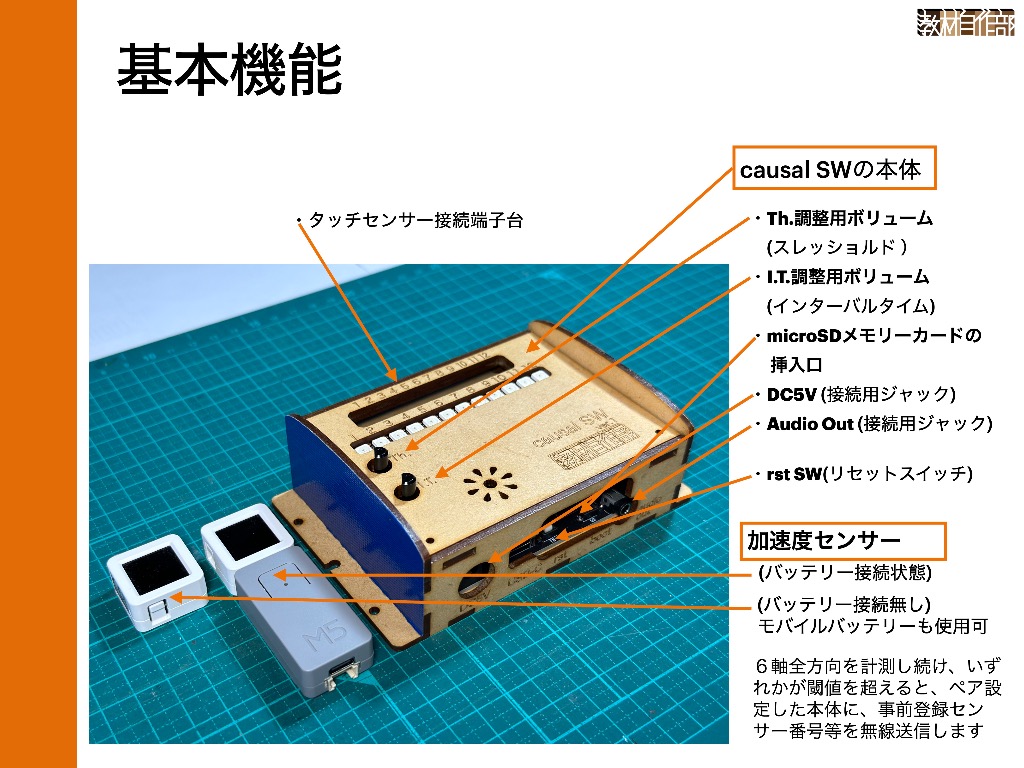 causal SW:電子工作応用教具作成用素材の情報共有コミュニティー
causal SW:電子工作応用教具作成用素材の情報共有コミュニティー
-
 世界イチ小さい!?1.1cmのゲーム機 "一閃ボーイ!"
世界イチ小さい!?1.1cmのゲーム機 "一閃ボーイ!"
-

