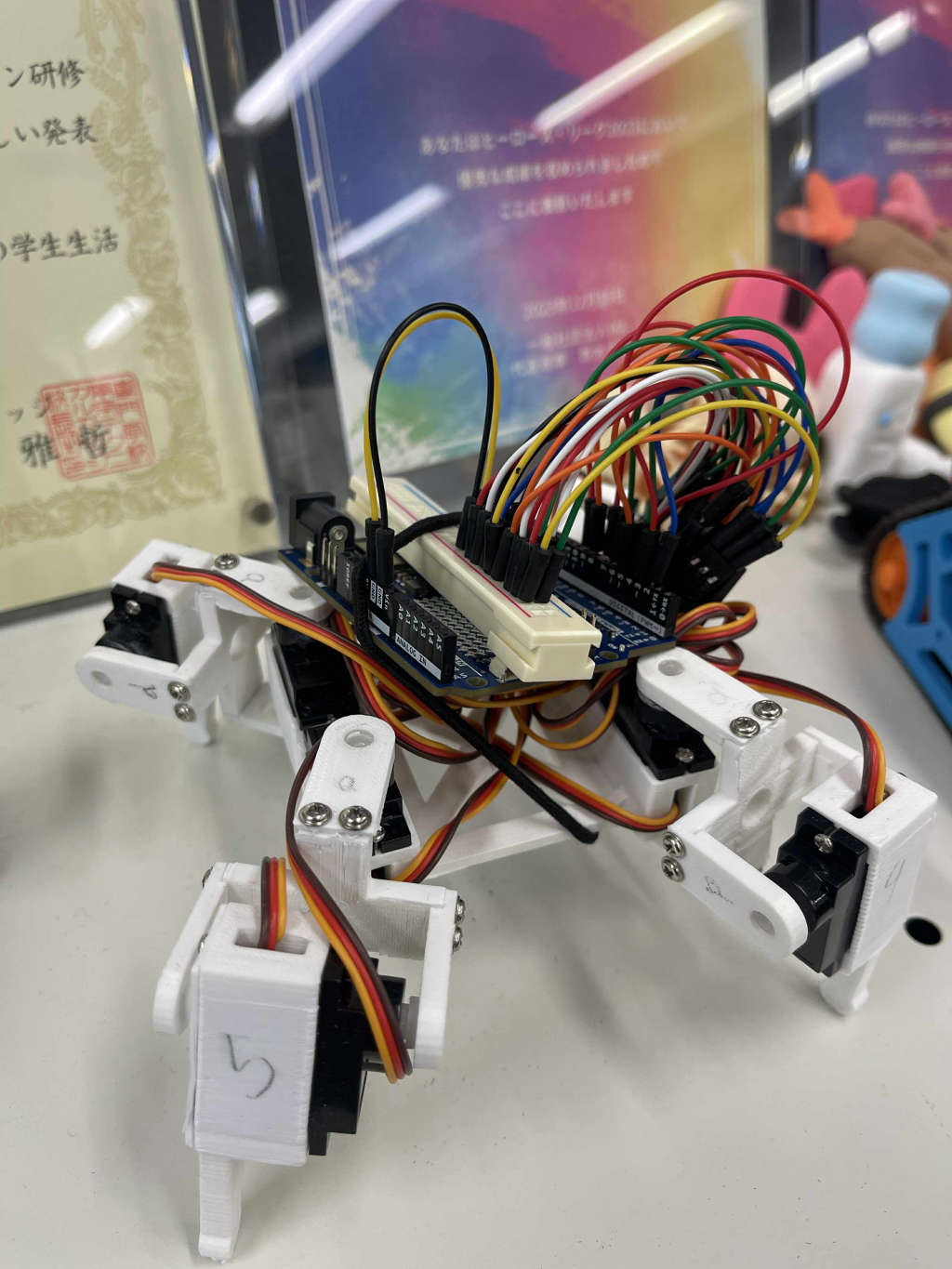
【M5Atom入門】四足歩行ローバーを作って遊んでみた♪
完成
© CC BY 4+
684
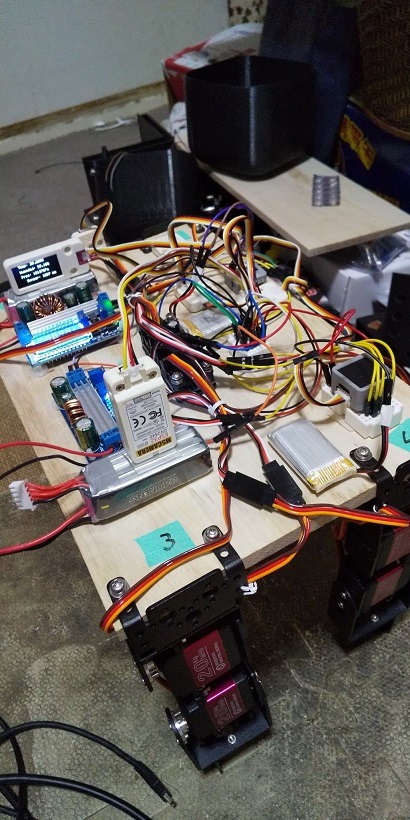
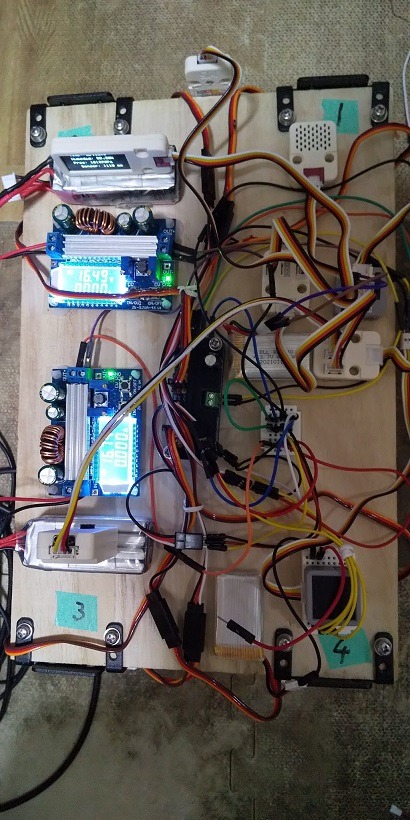
M5Stack製品を利用して、大きな四足歩行ロボットを作るとともに、各種センサーを搭載して、リアルタイムで動き回りながら計測結果を表示するローバーを作成してみた。
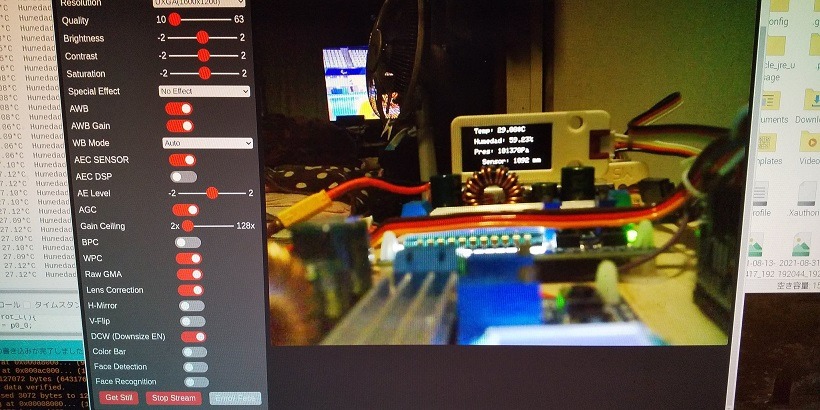
Web表示された映像を見て制御できる
- 動画
-
- 開発素材
- システム構成
-
- ストーリー
-
- メンバー
-
ウワン @muauan
-

- ウワン @muauan
-
- Hardware
- Software Developer
- Desginer and Engineer
-
- 関連イベント
-
-
 M5Stack Japan Creativity Contest 20212021-07-15 開催
M5Stack Japan Creativity Contest 20212021-07-15 開催
-
- 関連リンク
-

-
-
-
-
- 同じニオイがする作品
-
-
 CO2モニター自動換気システム
CO2モニター自動換気システム
-
 opniz
opniz
-
 クモロボット
クモロボット
-
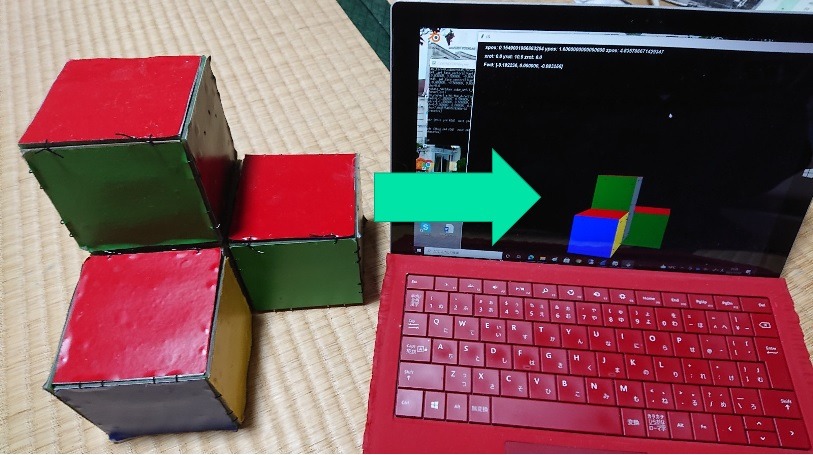 Real -> Virtual 変換システムその1
Real -> Virtual 変換システムその1
-
Proto lovers ♥



