Sonic Eye(超音波レーダー)
完成
© CC BY 4+
1457
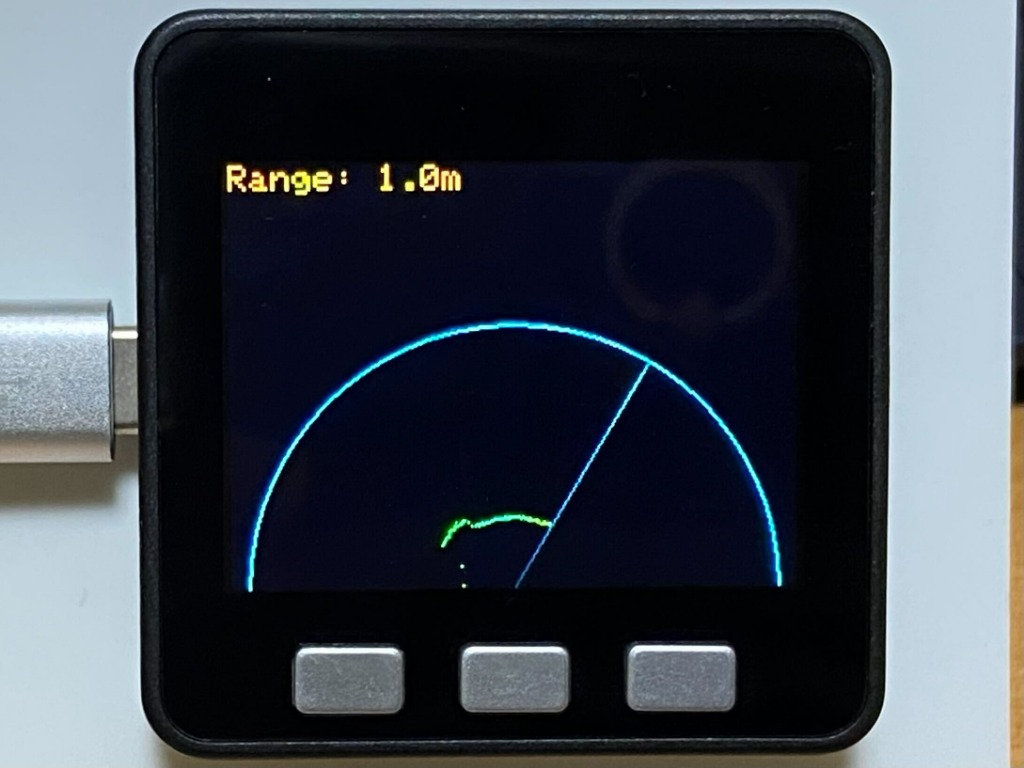
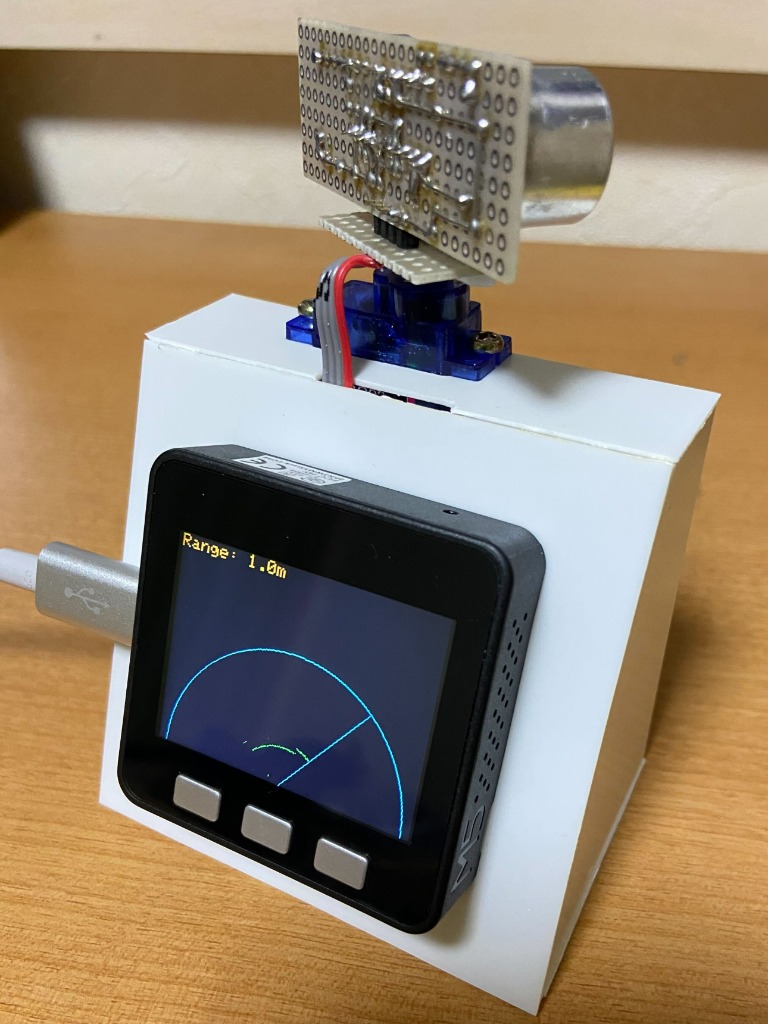
超音波センサーを使った距離測定を応用し、レーダーのように画面上に表示させる装置です。
This device is radar using ultrasound sensor.
- 動画
-
- 開発素材
-
ツール
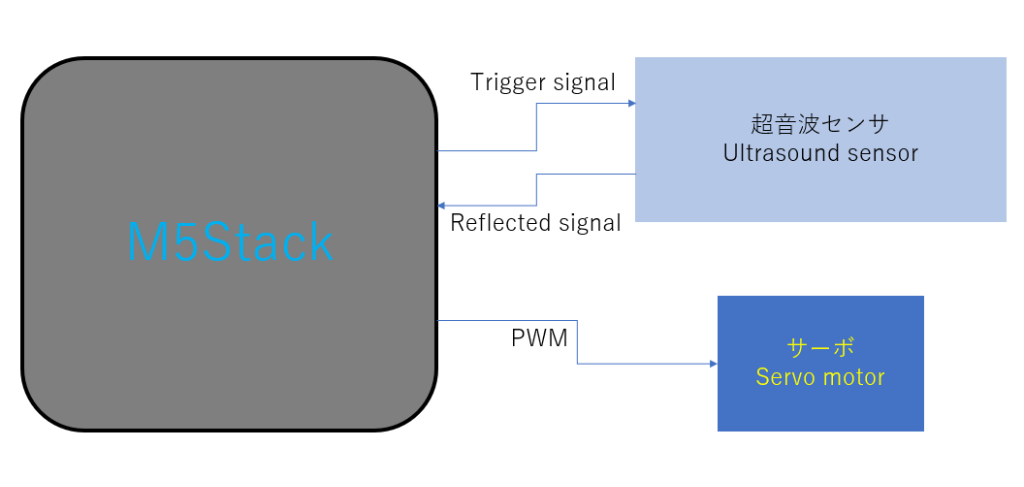
- システム構成
-
- ストーリー
-
- メンバー
-
-

- nichicon @nichicon
-
-
- 関連イベント
-
-
 M5Stack Japan Creativity Contest 20232023-07-15 開催
M5Stack Japan Creativity Contest 20232023-07-15 開催
-
- 関連リンク
-

- 同じニオイがする作品
-
-
 時を超えて…: いつでもオリンピック
時を超えて…: いつでもオリンピック
-
 嫁接近通知システム "まもるくん"
嫁接近通知システム "まもるくん"
-
 Twitter(X)やるだけでお金がもらえる装置
Twitter(X)やるだけでお金がもらえる装置
-
 M5StackとScratchとhapStakでスポーツの秋に挑戦!!
M5StackとScratchとhapStakでスポーツの秋に挑戦!!
-
Proto lovers ♥




すごくcoolですね!