ペット用自動給餌器を改造してIoT化(modify the pet feeder to IoT)
完成
© CC BY 4+
731
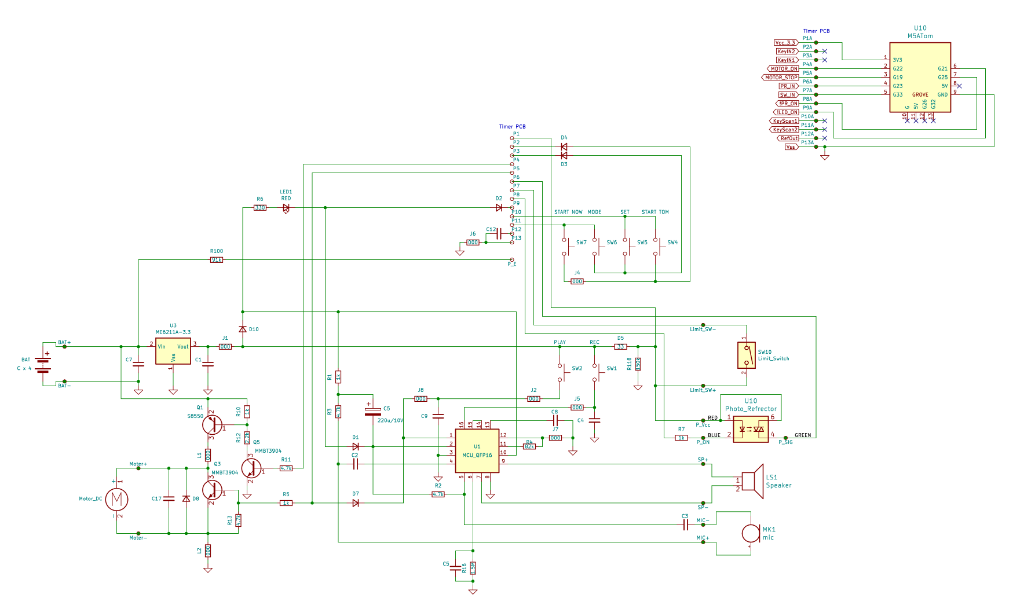
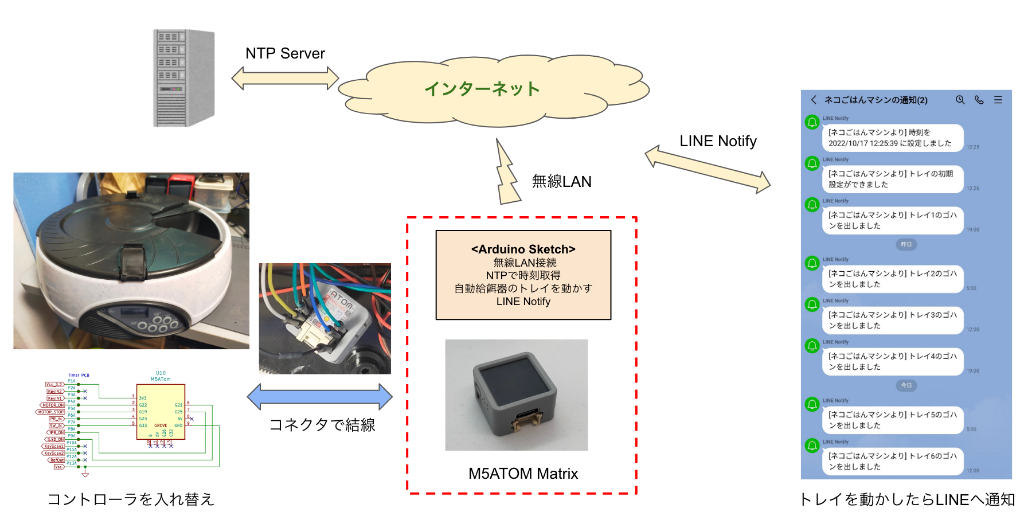
Amazonで購入した激安ペット給餌器を改造して、時刻合わせと給餌時間の設定を自動化するようにしました。
実際に動作したかがわかるように、餌が出たらLINEに通知する機能も追加しました。


- 動画
-
- 開発素材
-
デバイス
ツール
- システム構成
-
- ストーリー
-
- メンバー
-
-

- Masawo Yamazaki @masawoyamazaki
-
- Engineer/Programmer
-
- 関連イベント
-
-
 M5Stack Japan Creativity Contest 20232023-07-15 開催
M5Stack Japan Creativity Contest 20232023-07-15 開催
-
- 関連リンク
-

- 同じニオイがする作品
-
-
 All IoT化システム
All IoT化システム
-
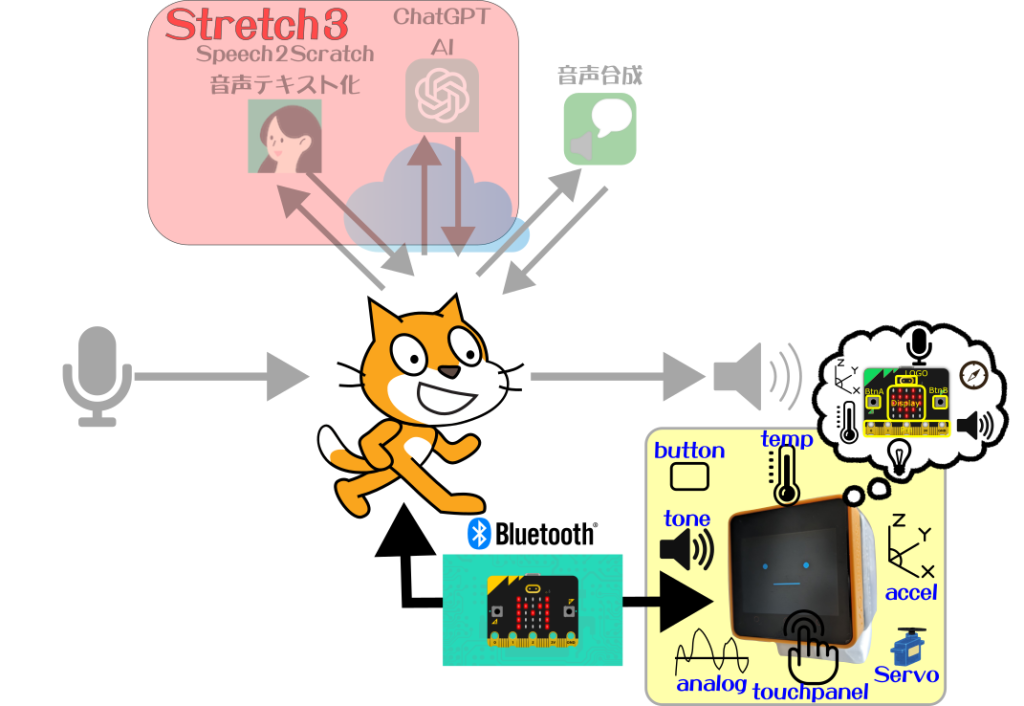 スタックチャン meets Scratch with M5bitLess
スタックチャン meets Scratch with M5bitLess
-
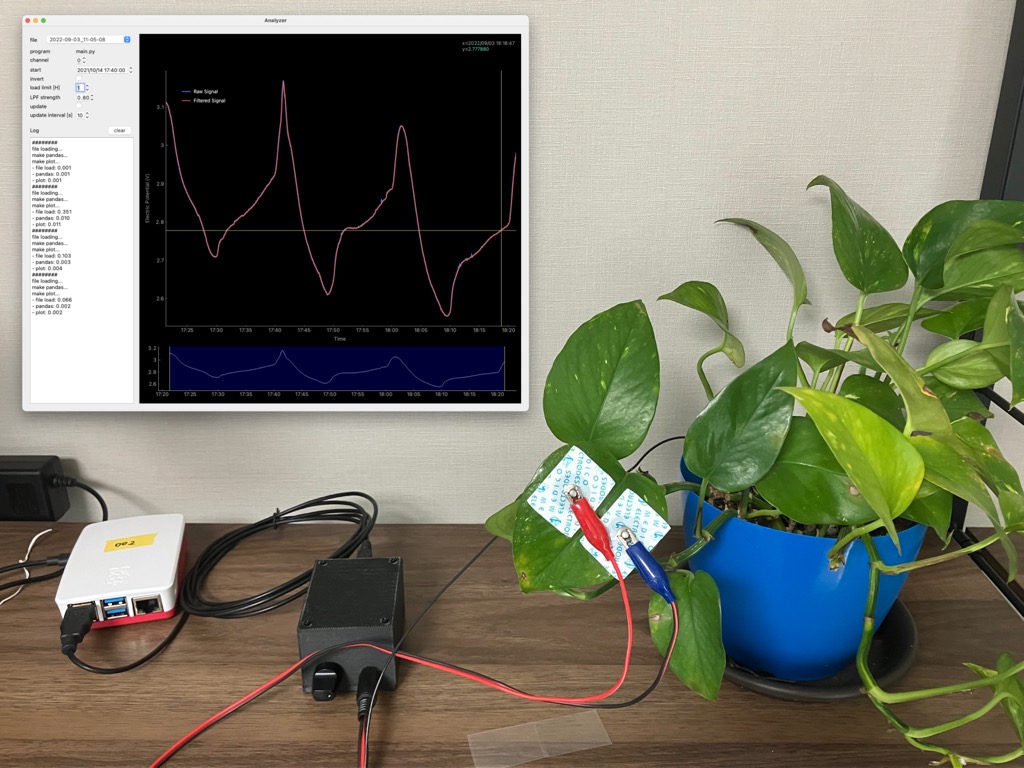 植物生体電位測定器
植物生体電位測定器
-
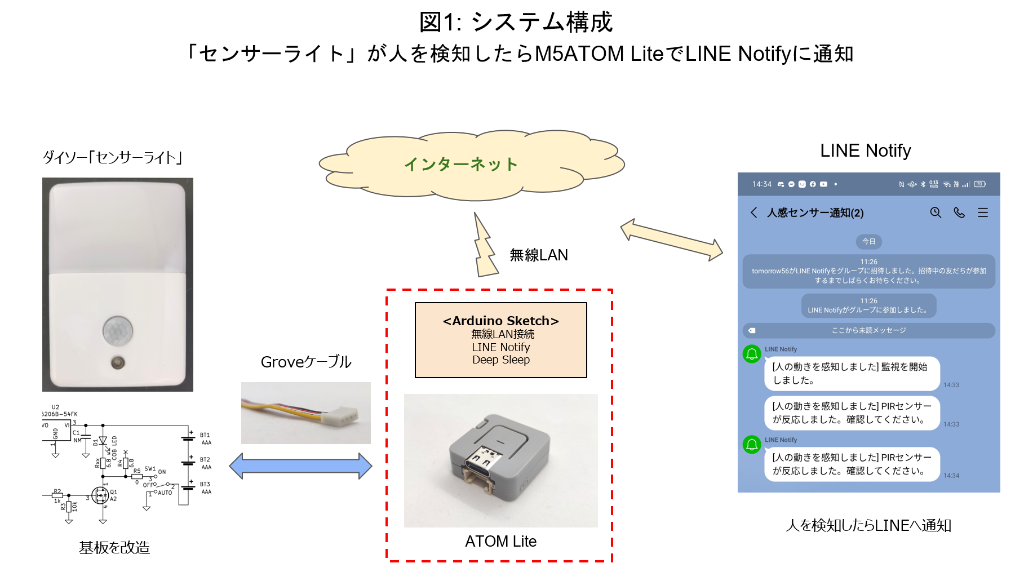 100均センサーライトで作る「遠隔監視システム」
100均センサーライトで作る「遠隔監視システム」
-
Proto lovers ♥