壊れたマウスのパーツで回転入力デバイスを作ってみた
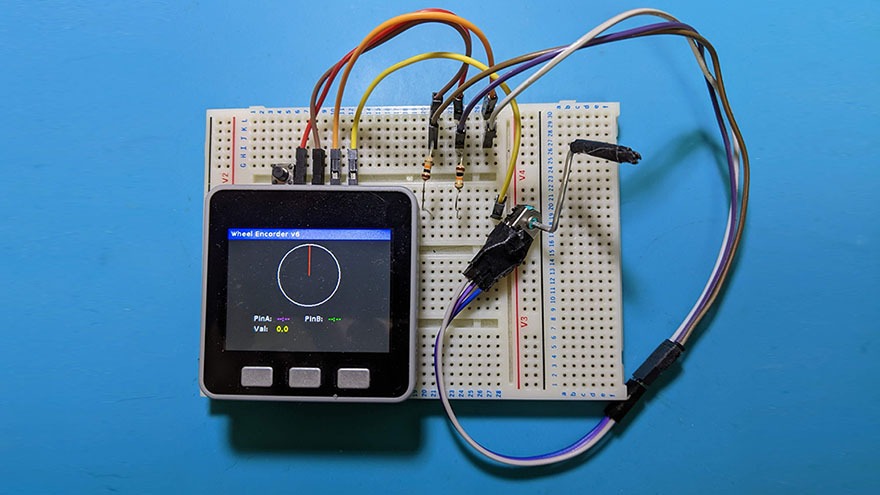
完成
© CC BY 4+
1316
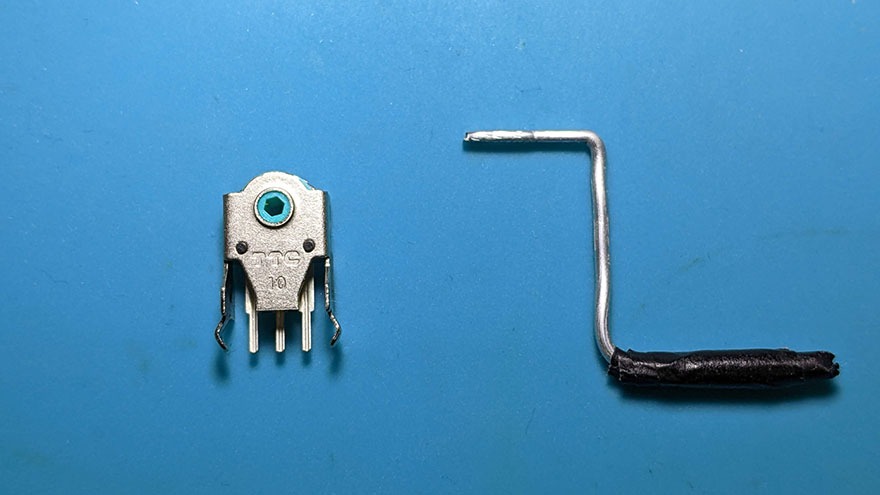
マウスホイールのエンコーダパーツを利用して、回転入力式のデバイスを作成してみました。
- 動画
-
- 開発素材
-
デバイス
ツール
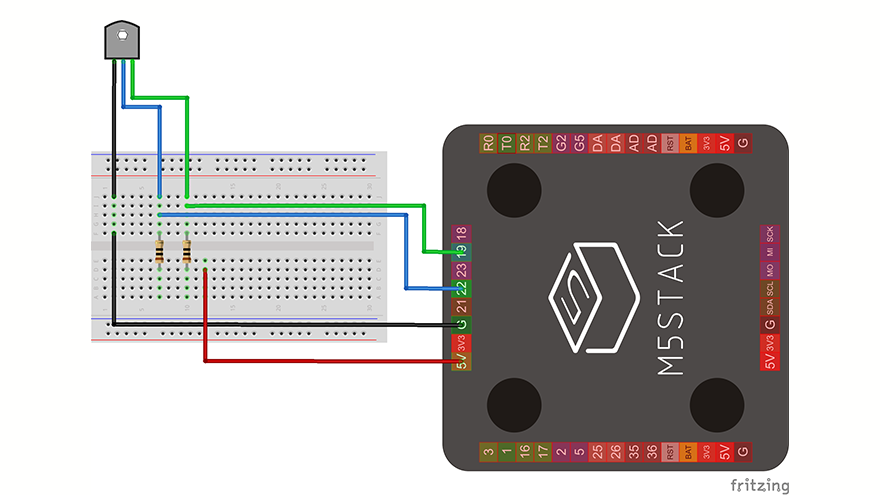
- システム構成
-
- ストーリー
-
- メンバー
-
合同会社プレーンプラン
-

- QINFU @qinfu
-
-
- 関連リンク
-

-
-
- 同じニオイがする作品
-
-
 「Study Link」ー "イチ"日も無駄にしない持続するラーニング!
「Study Link」ー "イチ"日も無駄にしない持続するラーニング!
-
 reNavigator: GPSナビ+Groveセンサ+AI機能拡張モジュール
reNavigator: GPSナビ+Groveセンサ+AI機能拡張モジュール
-
 専用アプリでマウス・キーボードの動作を設定登録「HHKM」
専用アプリでマウス・キーボードの動作を設定登録「HHKM」
-
 SyncFish Live 〜家にいながら、家族みんなで「初めてのワカサギ釣り」〜
SyncFish Live 〜家にいながら、家族みんなで「初めてのワカサギ釣り」〜
-
Proto lovers ♥


