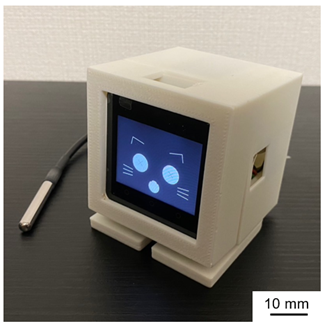
珈琲の抽出時における記録システム
完成
© CC BY 4+
238
珈琲の抽出時における味の再現性向上に向けた環境情報及び抽出温度の記録システム
- 動画
-
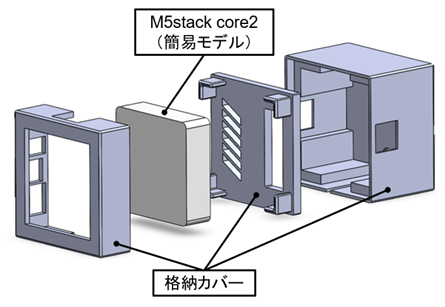
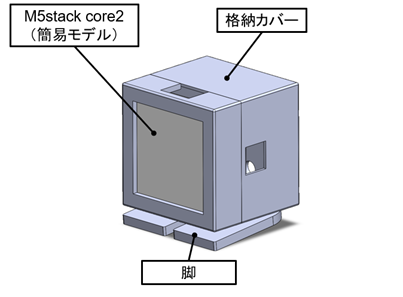
- 開発素材
-
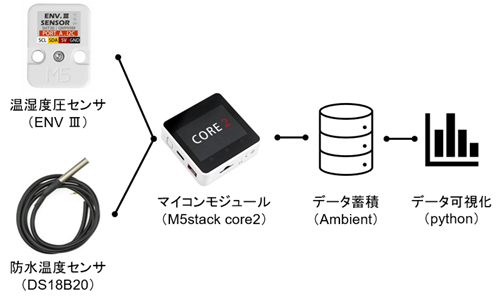
- システム構成
-
- ストーリー
-
- メンバー
-
-
- syu @syu_xx_
-
-
- 関連イベント
-
-
 M5Stack Japan Creativity Contest 20242024-06-01 開催
M5Stack Japan Creativity Contest 20242024-06-01 開催
-
- 同じニオイがする作品
-
-
 Twitter(X)やるだけでお金がもらえる装置
Twitter(X)やるだけでお金がもらえる装置
-
 嫁接近通知システム "まもるくん"
嫁接近通知システム "まもるくん"
-
 来客センサー(二代目)
来客センサー(二代目)
-
 During the Night -よるのあいまに-
During the Night -よるのあいまに-
-

