ラジドリ用ジャイロGyroM5
完成
© CC BY 4+
4976
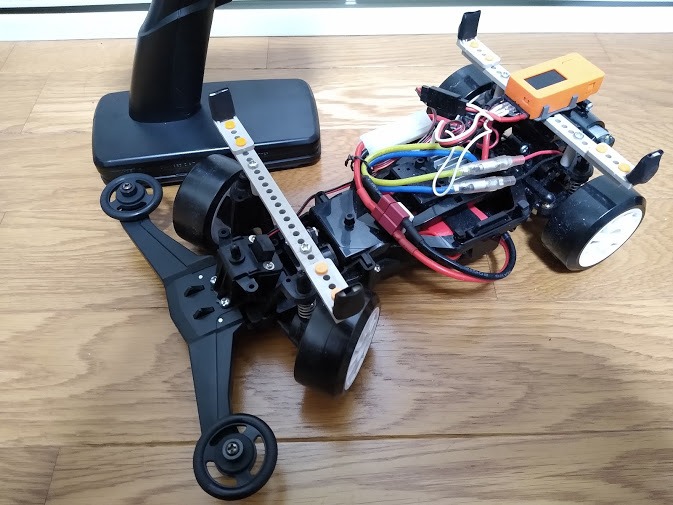
- M5StickCがRCカーのドリフト走行を安定化します。
- M5StickC stabilizes your "drift driving" of RC car.


- 動画
-
- 開発素材
-
デバイス
ツール
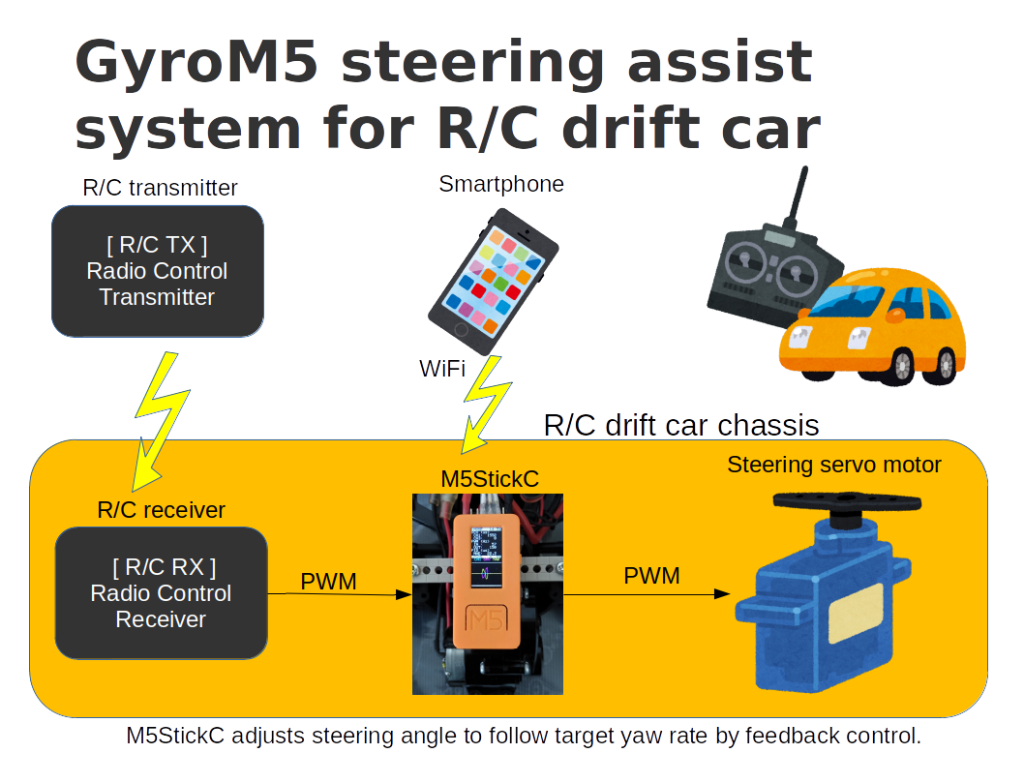
- システム構成
-
- ストーリー
-
- メンバー
-
-

- シンヨコ @hshin
-
-
- 関連イベント
-
-
 M5Stack Japan Creativity Contest 20212021-07-15 開催
M5Stack Japan Creativity Contest 20212021-07-15 開催
-
- 関連リンク
-

-
-
- 同じニオイがする作品
-
-
 サイバー心霊フォトフレーム
サイバー心霊フォトフレーム
-
 Lego Gyro-X Car Prototype Mk-2 ー レゴジャイロカーMk-2
Lego Gyro-X Car Prototype Mk-2 ー レゴジャイロカーMk-2
-
 Bird Clock Timer
Bird Clock Timer
-
 Raspberry Piの端子に接続する時計の改良
Raspberry Piの端子に接続する時計の改良
-
Proto lovers ♥






コメント失礼します。
M5Atomでジャイロ作成しようとしましたが、いろいろエラーが出てコンパイルできません。
素人なので、どう直したらいいのかわからないので、出来ましたら、最新版のAPPをアップしていただけないでしょうか?よろしくお願いいたします。