ソラカメを、M5StickCを使ってサーボモータで動かしてみた。
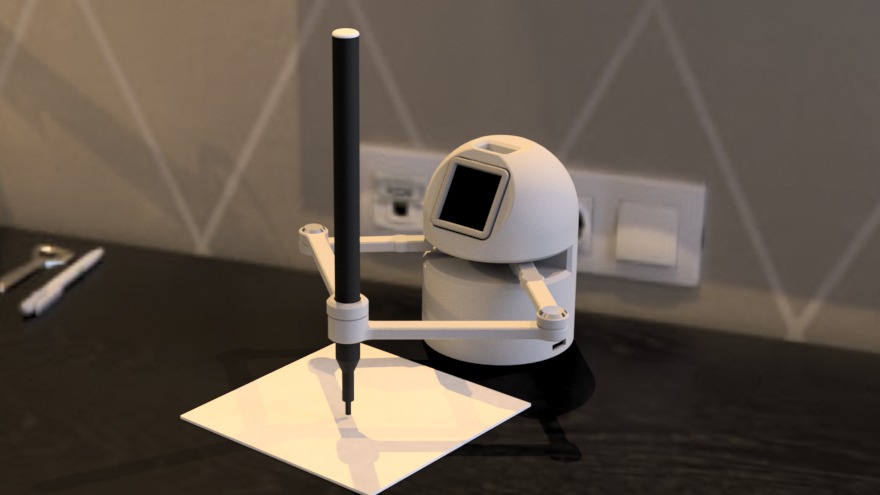
完成
© CC BY 4+
489
ALGYAN 7th 記念イベントのプレゼントで戴いた「ソラカメ」を見張り用カメラとして、出来るだけ広範囲に監視ができるように、M5stick Cを使ってサーボモーターを動かしてみました。



- 動画
-
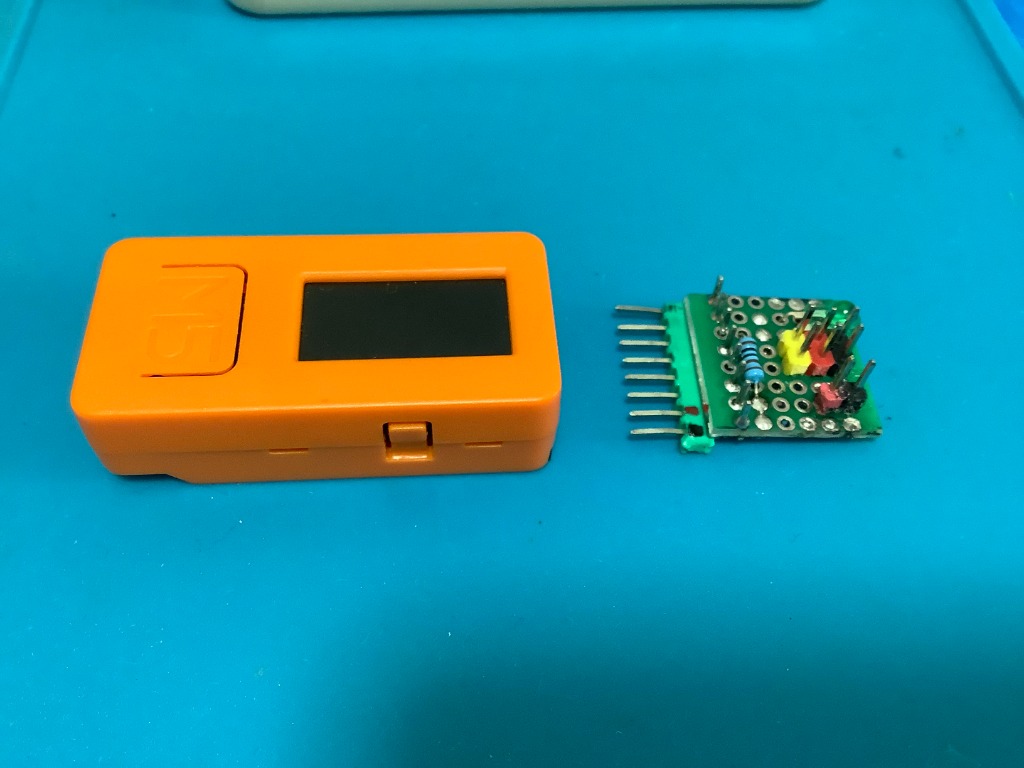
- 開発素材
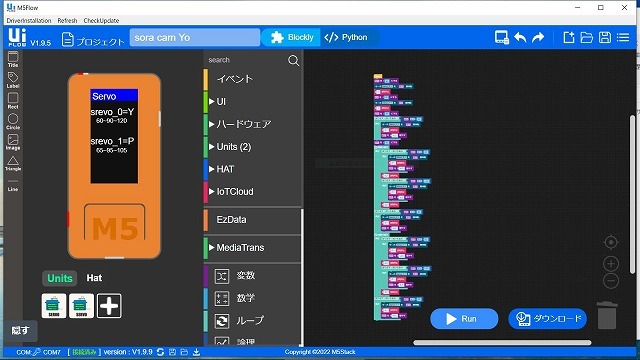
- システム構成
-
- メンバー
-
-

- ナッキィー @nakkyi9130
-
-
- 関連イベント
-
-
 M5Stack Japan Creativity Contest 20222022-07-15 開催
M5Stack Japan Creativity Contest 20222022-07-15 開催
-
- 関連リンク
-

- 同じニオイがする作品
-
-
 CryingBaby (day 0)
CryingBaby (day 0)
-
 子供成長支援モビリティ ToMobility Ver2
子供成長支援モビリティ ToMobility Ver2
-
 世界最小クラス? 指乗りサイズ マイクロロボット
世界最小クラス? 指乗りサイズ マイクロロボット
-
 M5プロッタロボ
M5プロッタロボ
-

