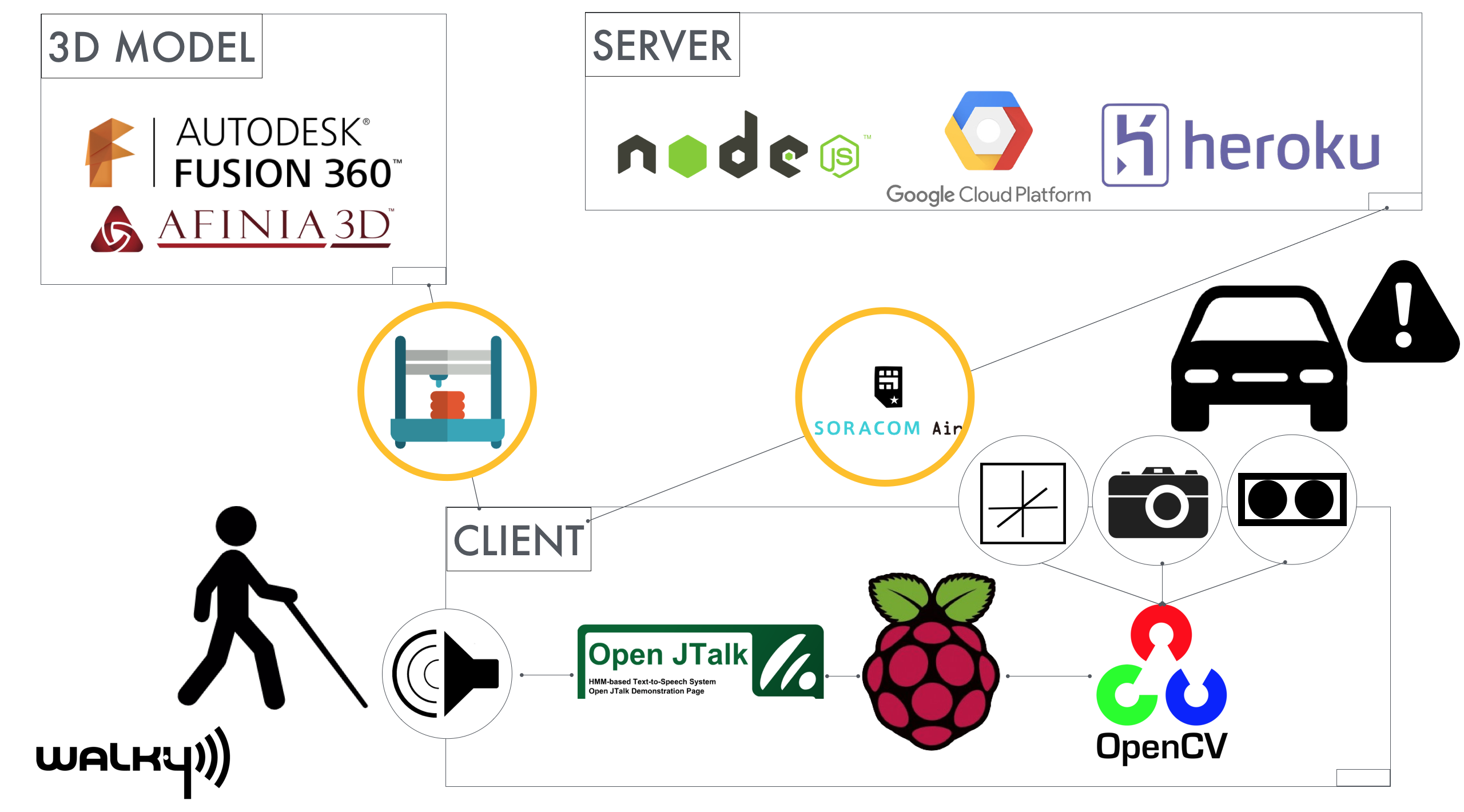
Walky
完成
© CC BY 4+
739


- 動画
-
- 開発素材
-
API
デバイス
- ストーリー
-
- メンバー
-
東工大メディア研究会
-
- @Hiroki11x
-
- プロダクトデザイン・モデリング、SORACOMAir通信周り
-
- 同じニオイがする作品
-
-
 MOMORU - お母さん目覚まし -
MOMORU - お母さん目覚まし -
-
 「Study Link」ー "イチ"日も無駄にしない持続するラーニング!
「Study Link」ー "イチ"日も無駄にしない持続するラーニング!
-
 All IoT化システム
All IoT化システム
-
 木苺式クイズ早押し機
木苺式クイズ早押し機
-
Proto lovers ♥


