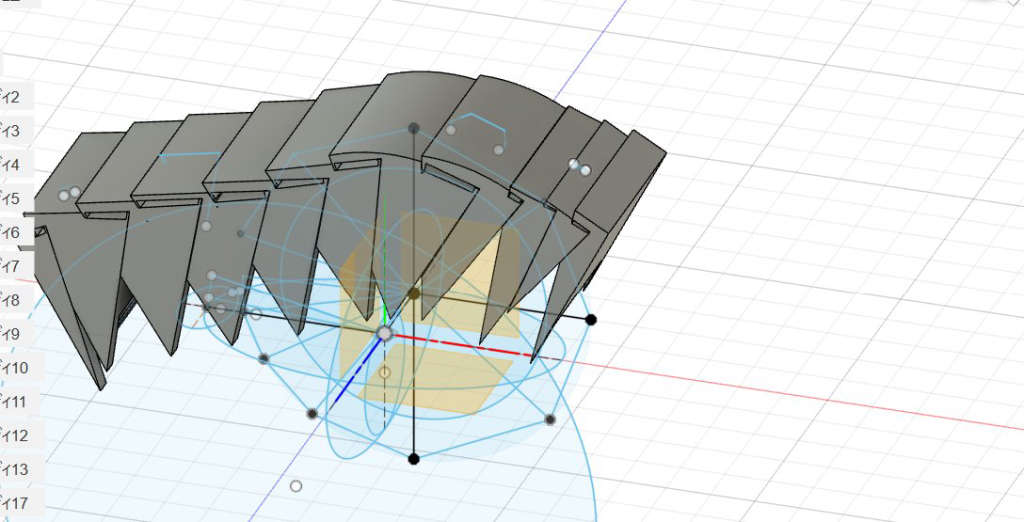
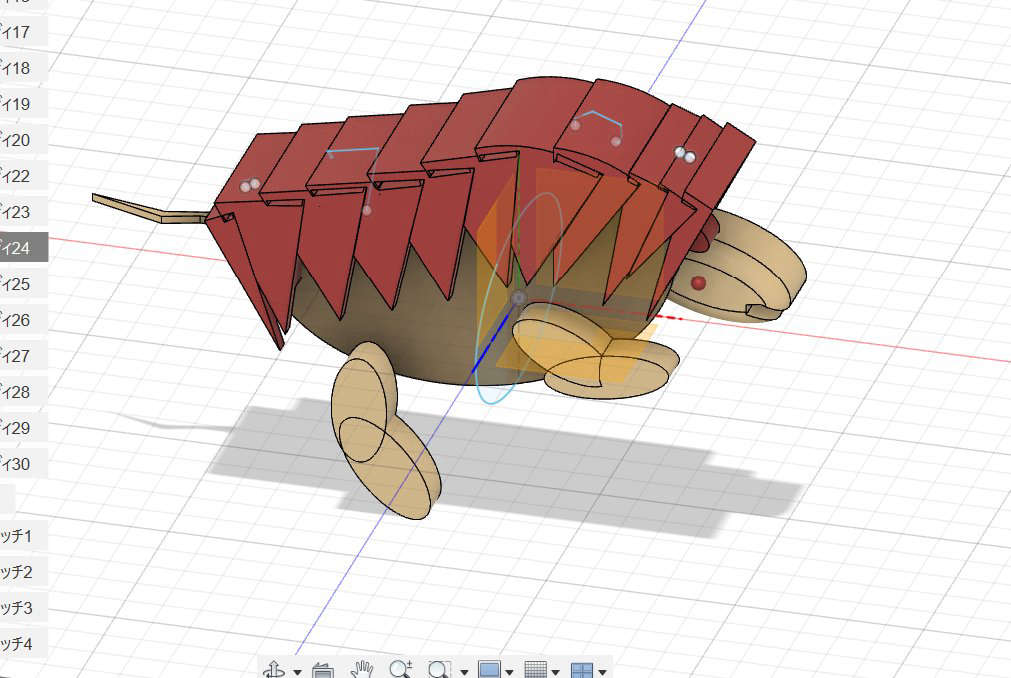
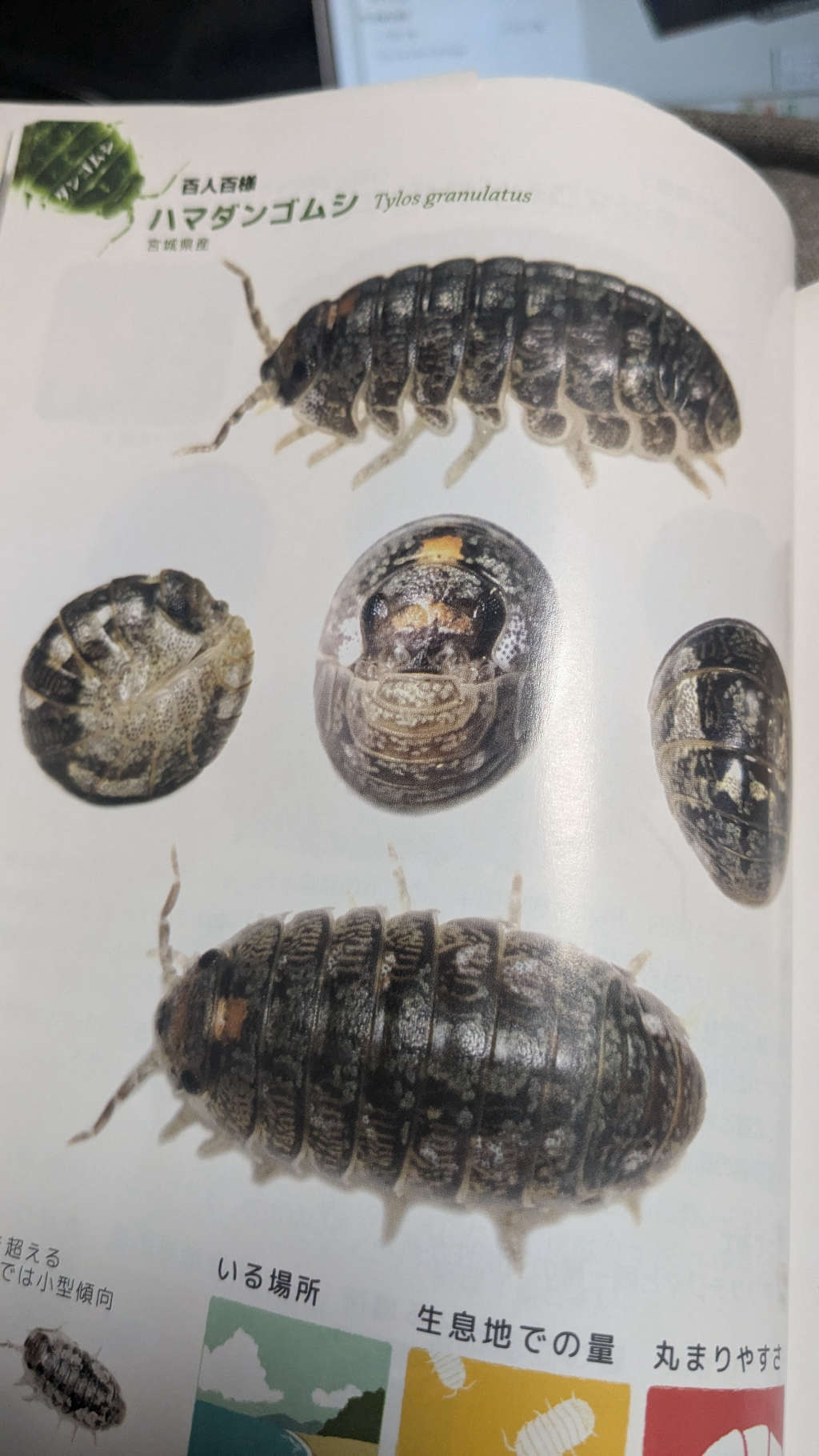
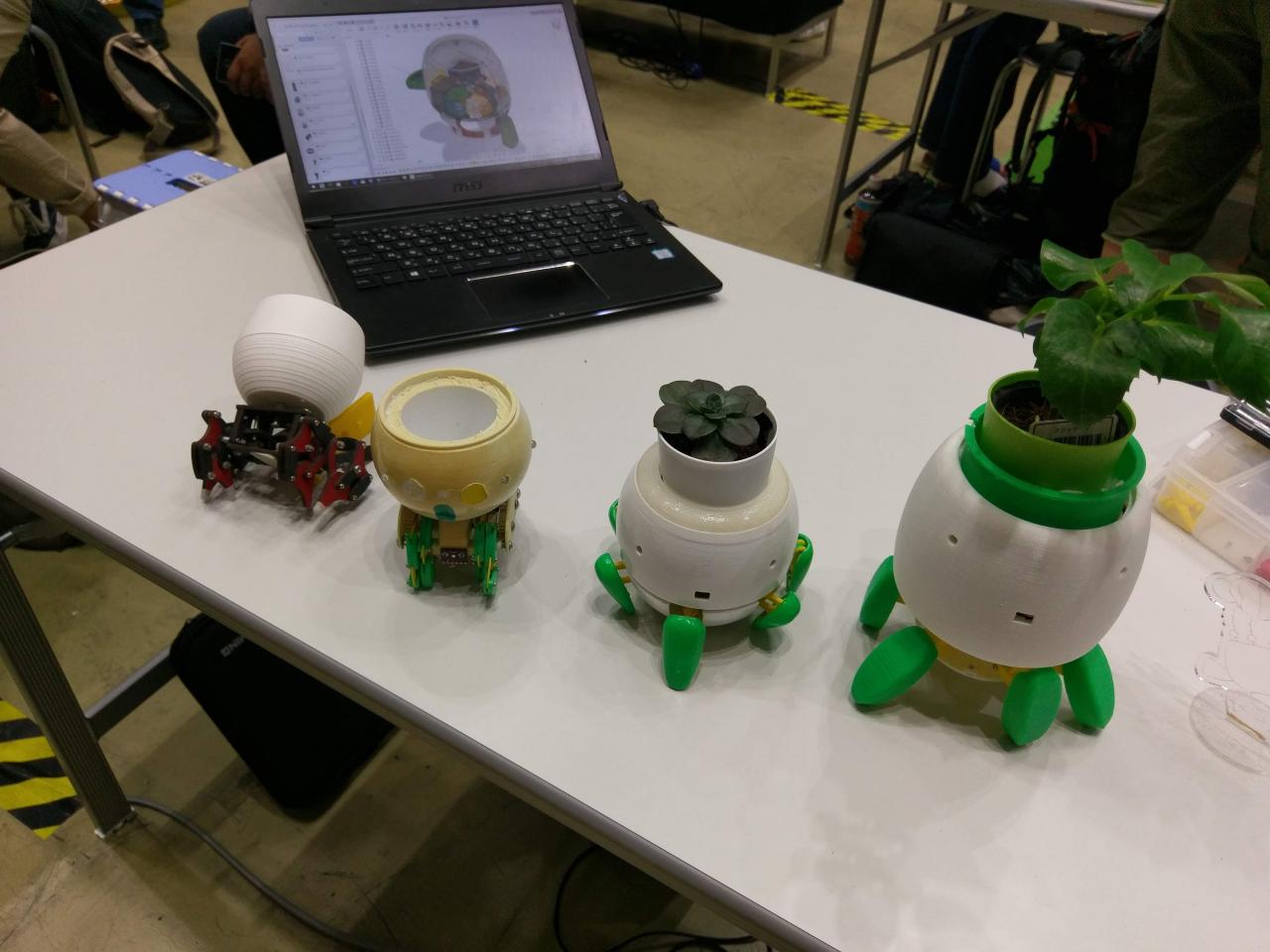
超インタラクティブ甲殻類(ダイオウグソクムシあるいはダンゴムシモドキ)!!!!
開発中
© CC BY 4+
1266
甲殻類と、その可愛さに無限の可能性を感じており、それをうまく表現しようと試みております!
超インタラクティブ!超ダイオウ!(デカいの意訳)


- 動画
-
- 開発素材
- システム構成
-

- ストーリー
-
- メンバー
-
-

- はたけ/ Furukawa @hatake
-
-
- 同じニオイがする作品
-
-
 クルマ、子供の命を守るレーダーセンサーシステム RCS-01
クルマ、子供の命を守るレーダーセンサーシステム RCS-01
-
 ドッキング!アトムチャン M(DK-Atom Chan M)
ドッキング!アトムチャン M(DK-Atom Chan M)
-
 ヒボたん ver.4 〜 移動式植物栽培ロボット 〜
ヒボたん ver.4 〜 移動式植物栽培ロボット 〜
-
 ALL IN ONE BOTTLE
ALL IN ONE BOTTLE
-
Proto lovers ♥


