M5Stackとダイビング(9軸センサーログ・Unityで姿勢再現)
開発中
© CC BY 4+
1939
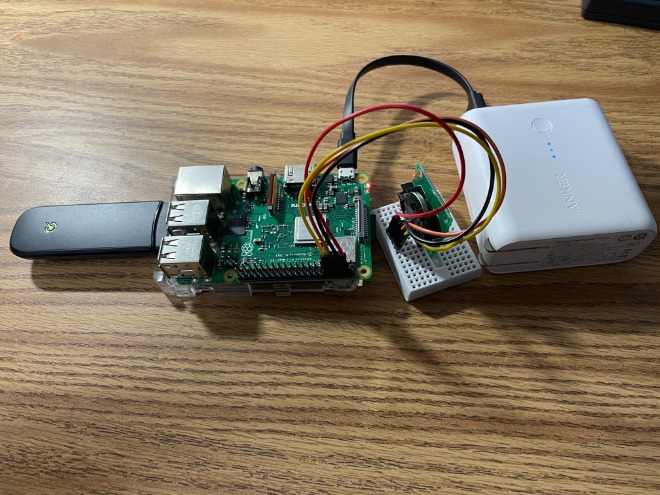
水中動作実験第二段。Raspberry Piに続き、M5Stackを海に沈めます。。
水中ではM5Stack Grayの9軸センサーの値をSDカードに書き込み
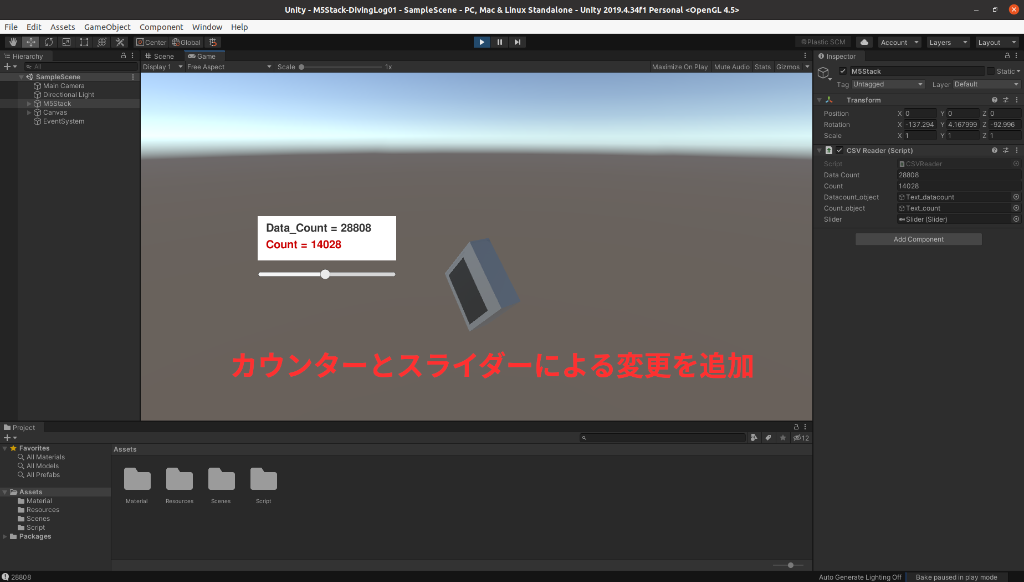
その後、Unityで姿勢を再現します。


- 動画
-
- 開発素材
- システム構成
-
- ストーリー
-
- メンバー
-
-
- es.. @esc122
-
-
- 同じニオイがする作品
-
-
 サイバー心霊フォトフレーム
サイバー心霊フォトフレーム
-
 TechSeebo
TechSeebo
-
 アルコールを取り始めると、飲み始めた場所が家族に通知されるシステム
アルコールを取り始めると、飲み始めた場所が家族に通知されるシステム
-
 reNavigator: GPSナビ+Groveセンサ+AI機能拡張モジュール
reNavigator: GPSナビ+Groveセンサ+AI機能拡張モジュール
-
Proto lovers ♥





m5stack初心者です。
bmm150.inoから得られるMAG X/Y/Zはロールピッチヨーのデータだと思われますが、こちらの転置等の三次元への拡張作業はm5stack外で処理されていますか?
m5stackで記録したデータを
m5stack外でPythonにて読み込んで変換してます。
ありがとうございます。
同じような手順で考案しておりましたので頑張ります!
SDカードにcsvで保存するところで、ボタンを押した瞬間のgetAhrsData(&pitch, &roll, &yaw)のデータを記録することはできたのですが、時間経過で次にボタンを押すまで...という処理ができずに困っております。よろしければ教えていただけないでしょうか?