iTrackingCam「自動追尾カメラをイチから作ってみた」
完成
© CC BY 4+
3066
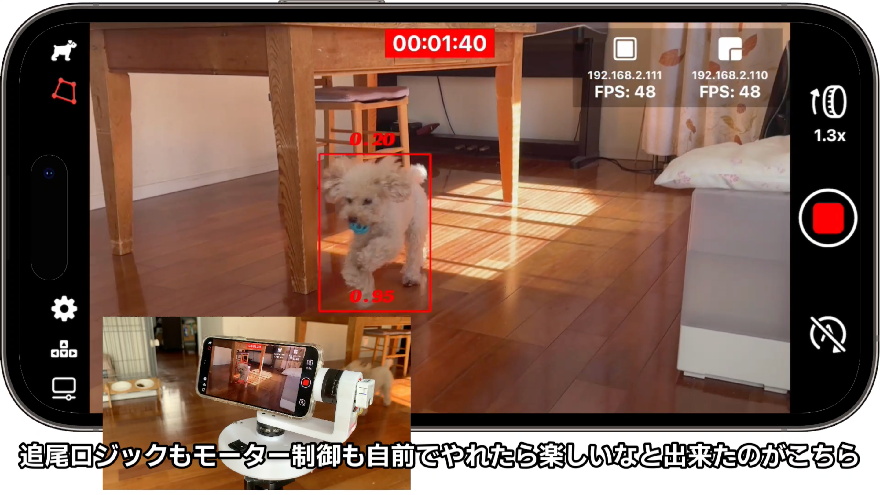
追尾ロジックもモーター制御まで自前でやれたらとイチから作ってみました
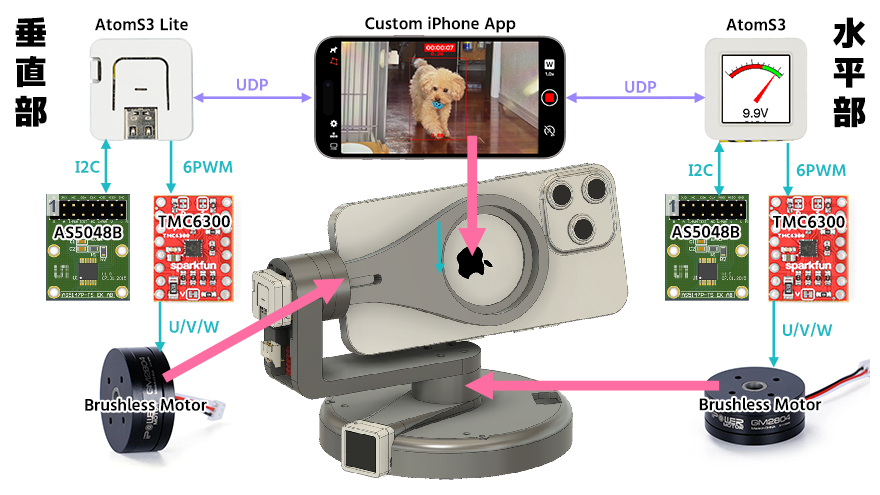
iPhoneのカメラで物体を認識し2軸のモーターを駆動
ワンコやバイクに乗ったライダーも遅延なく自動追尾!
DockKitもどき
-
 3位M5Stack Japan Creativity Contest 2024
3位M5Stack Japan Creativity Contest 2024



- 動画
-
- 開発素材
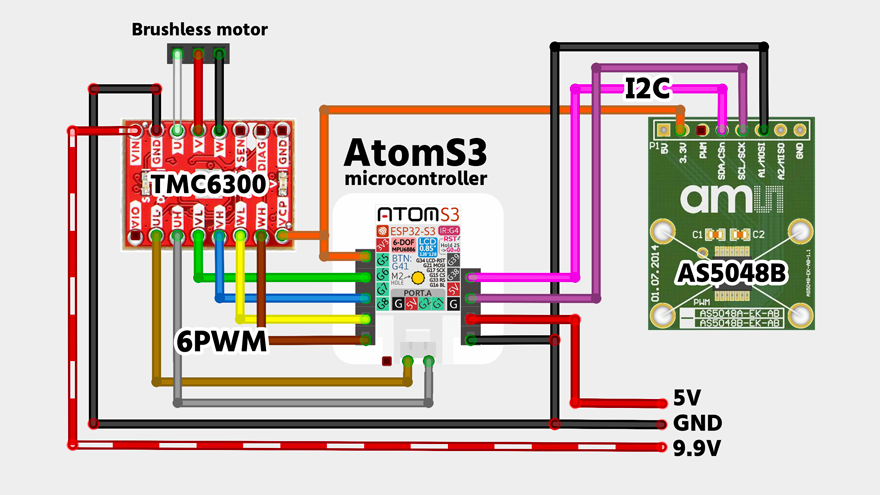
- システム構成
-
- ストーリー
-
- メンバー
-
-

- Takumi Abe @takumi
-
- ぜんぶやる
-
- 関連イベント
-
-
 M5Stack Japan Creativity Contest 20242024-06-01 開催
M5Stack Japan Creativity Contest 20242024-06-01 開催
-
- 関連リンク
-

- 同じニオイがする作品
-
-
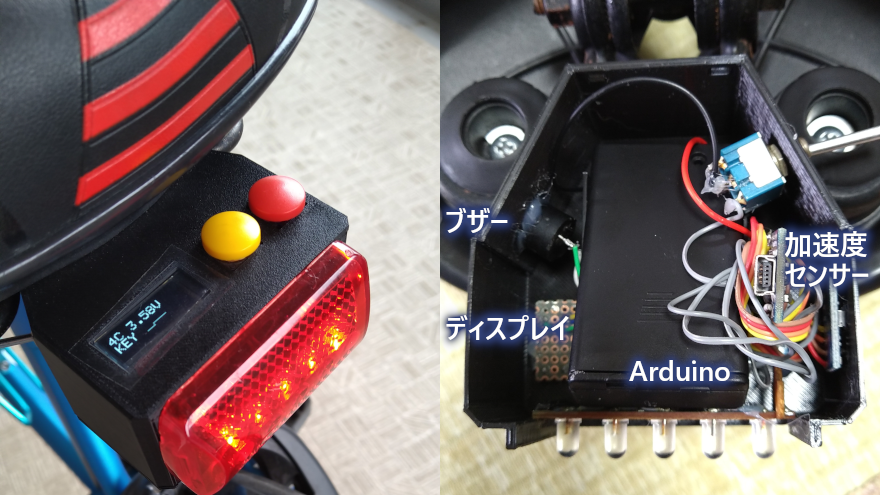 多機能!自転車用テールランプ
多機能!自転車用テールランプ
-
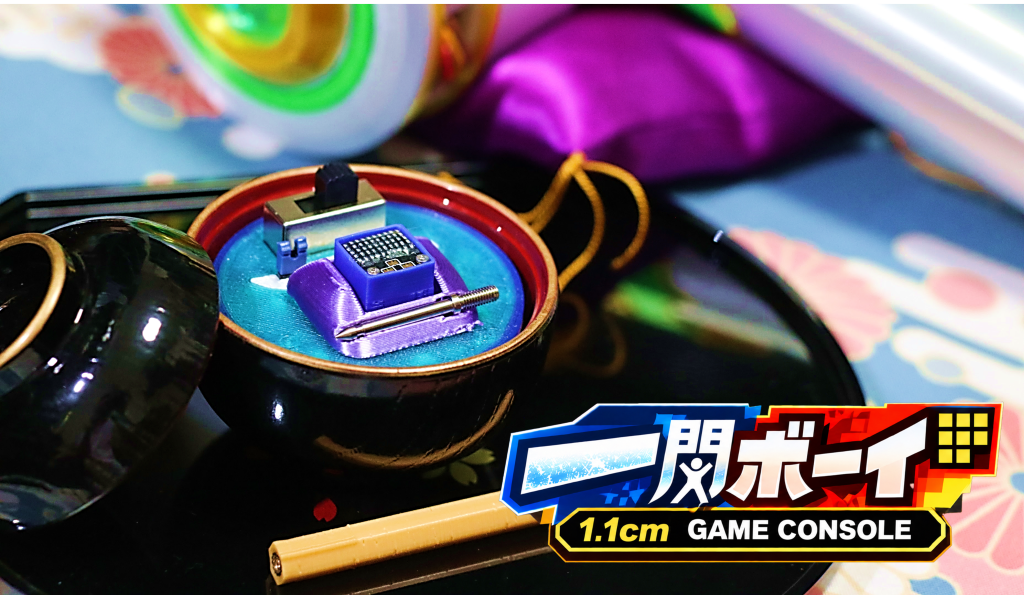 世界イチ小さい!?1.1cmのゲーム機 "一閃ボーイ!"
世界イチ小さい!?1.1cmのゲーム機 "一閃ボーイ!"
-
 嫁接近通知システム "まもるくん"
嫁接近通知システム "まもるくん"
-
 トイレの神様
トイレの神様
-
Proto lovers ♥











YouTubeにて紹介させていただきました!
https://youtube.com/live/BKjBP7Rf6-0
67番目はスマホ搭載自動追システム。この作品は効果はすばらしく、必要な技術を上手に使いつつ、こだわりの制作レベルも素晴らしい作品でした。