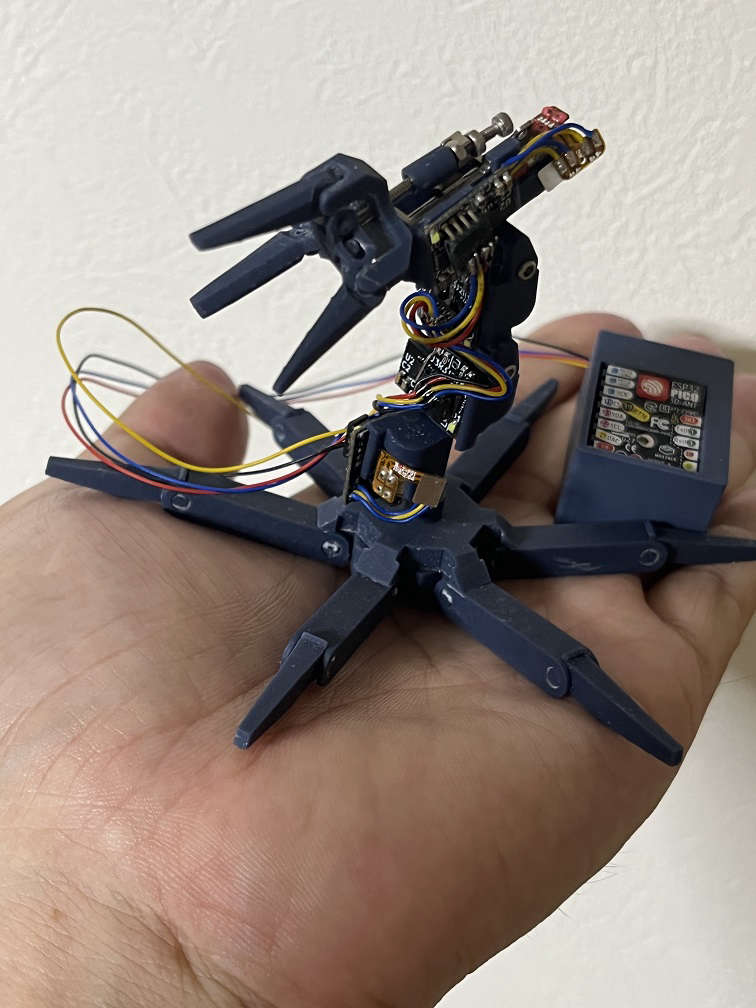
手乗りアームロボット M5ver
完成
© CC BY 4+
379
“できるかぎり小さく”をコンセプトにアームロボットを製作。通常のサーボモータでは実現できなかったため、遊星ギアを装備したマイクロステッピングモータを探し出して実現。
- 動画
-
- 開発素材
-
ツール
デバイス
- システム構成
-
- ストーリー
-
- メンバー
-
-
- moguzo.com @moguzo
-
-
- 関連イベント
-
-
 M5Stack Japan Creativity Contest 20242024-06-01 開催
M5Stack Japan Creativity Contest 20242024-06-01 開催
-
 「Ogaki Mini Maker Faire 2024」の出展作品まとめ(一部だよ|非公式だよ)2024-11-23 開催
「Ogaki Mini Maker Faire 2024」の出展作品まとめ(一部だよ|非公式だよ)2024-11-23 開催
-
- 同じニオイがする作品
-
-
 メダカの住む環境を快適に!確実に食事を提供するぞ!(自動餌やり機)【コンテスト参加用】
メダカの住む環境を快適に!確実に食事を提供するぞ!(自動餌やり機)【コンテスト参加用】
-
 イベントでゲットしたおみやげで工作する
イベントでゲットしたおみやげで工作する
-
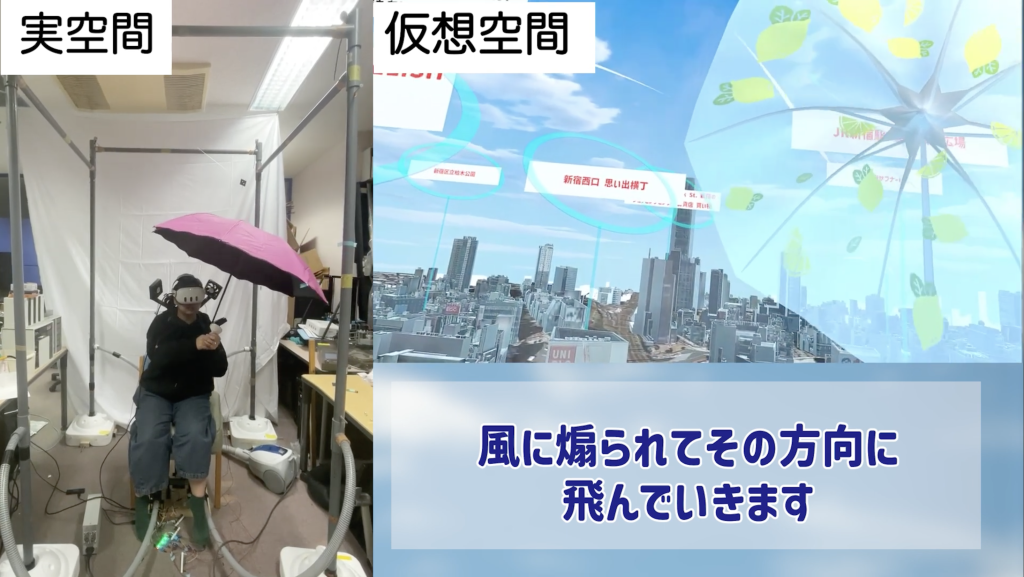 空傘散歩
空傘散歩
-
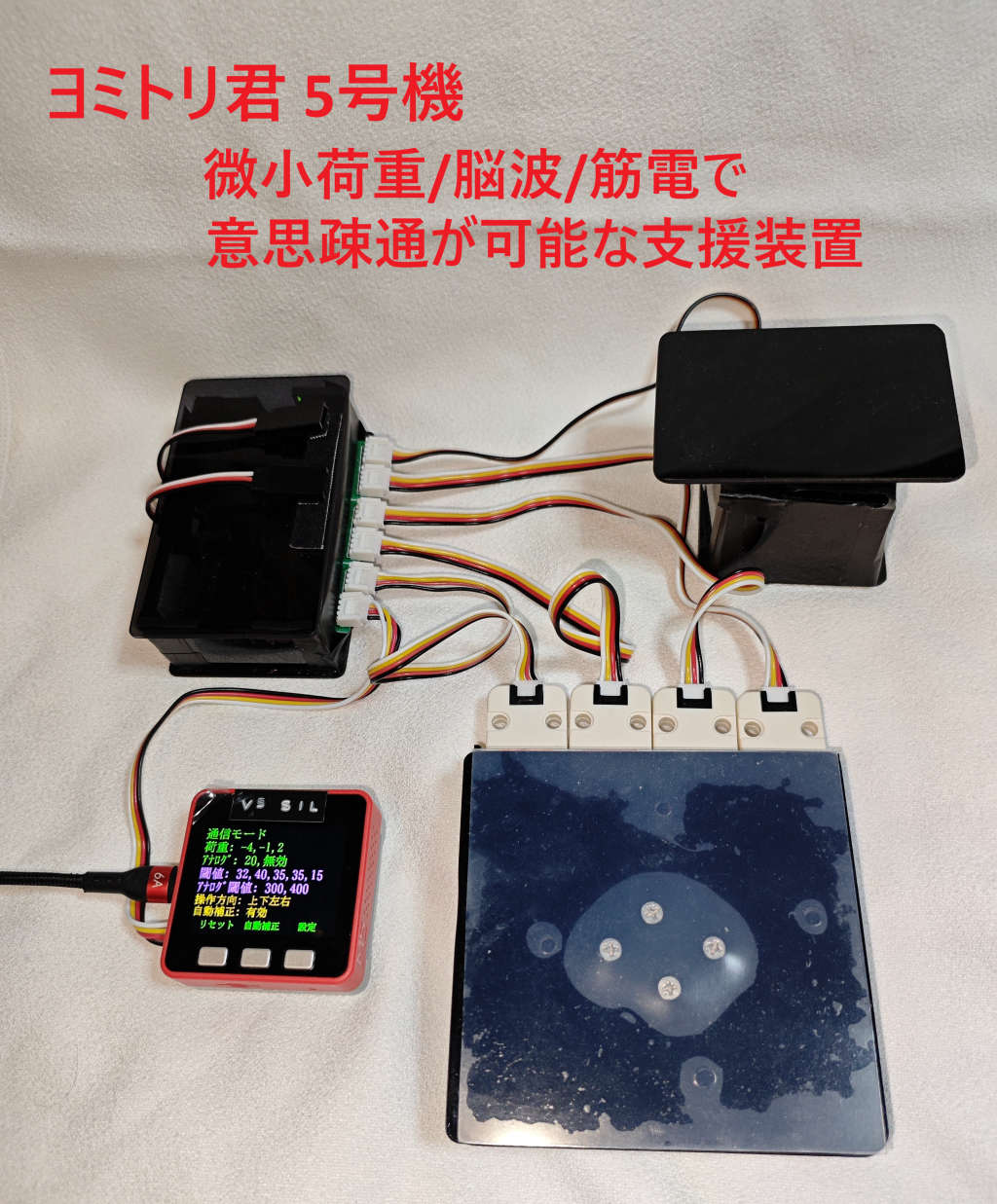 ヨミトリ君5号機 指筆談(指談)の動作を応用し、微小荷重/脳波/筋電で意思疎通が可能な支援装置
ヨミトリ君5号機 指筆談(指談)の動作を応用し、微小荷重/脳波/筋電で意思疎通が可能な支援装置
-
Proto lovers ♥