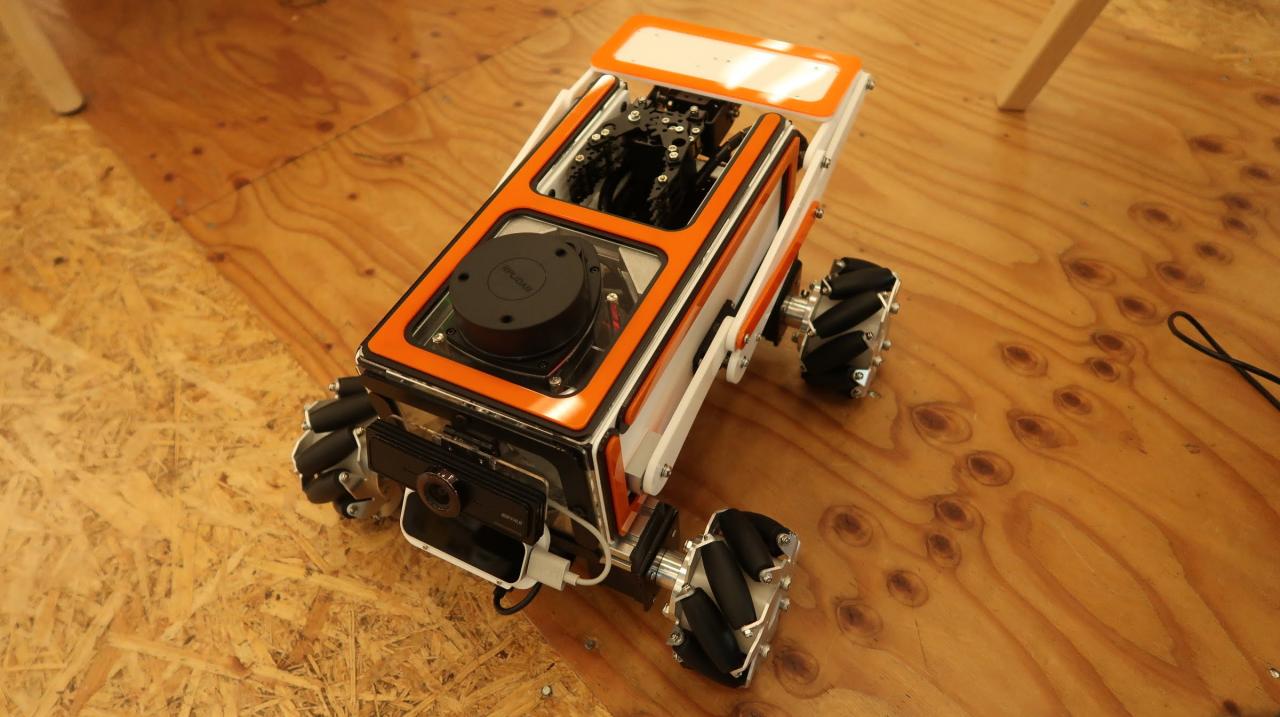
お菓子配りロボット
完成
© CC BY 4+
3912


- 動画
-
- 開発素材
- ストーリー
-
- メンバー
-
motoms
-

- 狩野元臣 @motomi
-
- DesignEngineer(全般)
-
- 同じニオイがする作品
-
-
 ぶらっくぺっぱー
ぶらっくぺっぱー
-
 M5Stack Core2を使用した自作キーボードキット、 AZ-M5ortho
M5Stack Core2を使用した自作キーボードキット、 AZ-M5ortho
-
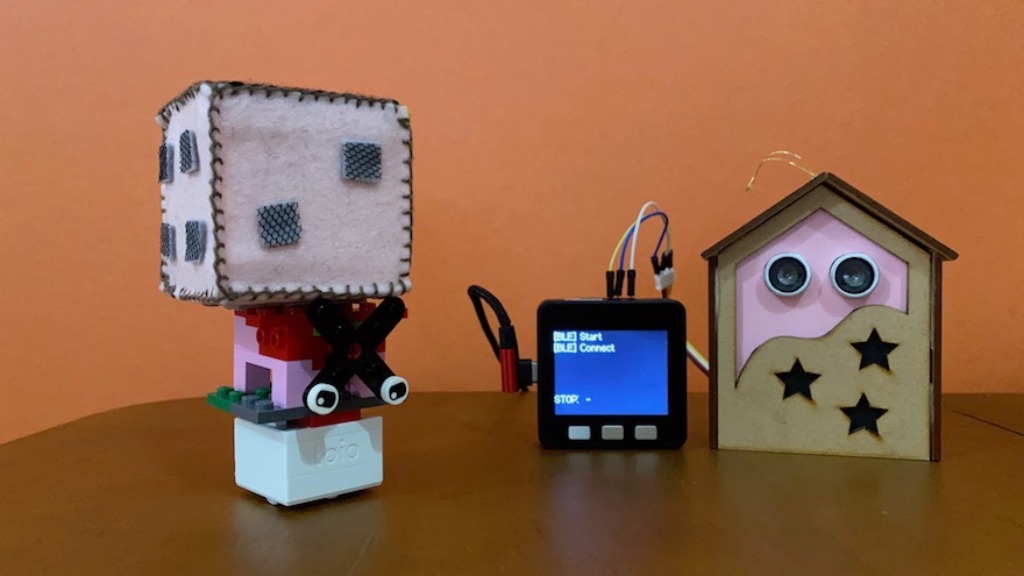 サイコロを振るロボット「ECHO-Ro」
サイコロを振るロボット「ECHO-Ro」
-
 M5Paperでキーボード
M5Paperでキーボード
-
Proto lovers ♥


