指乗りサイズのマイクロロボ
開発中
© CC BY 4+
300
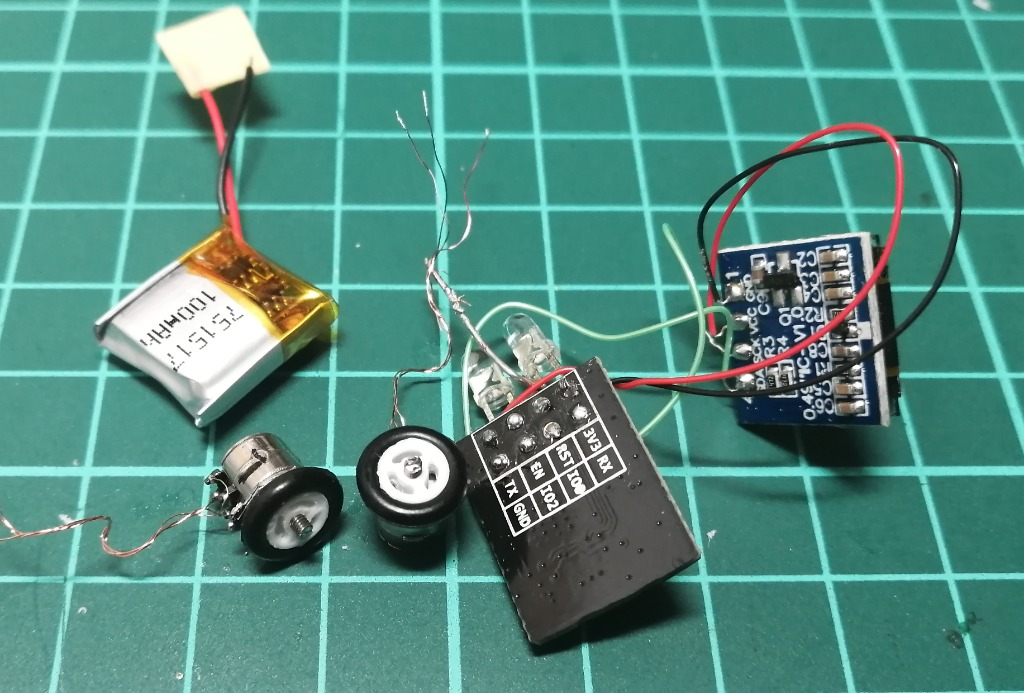
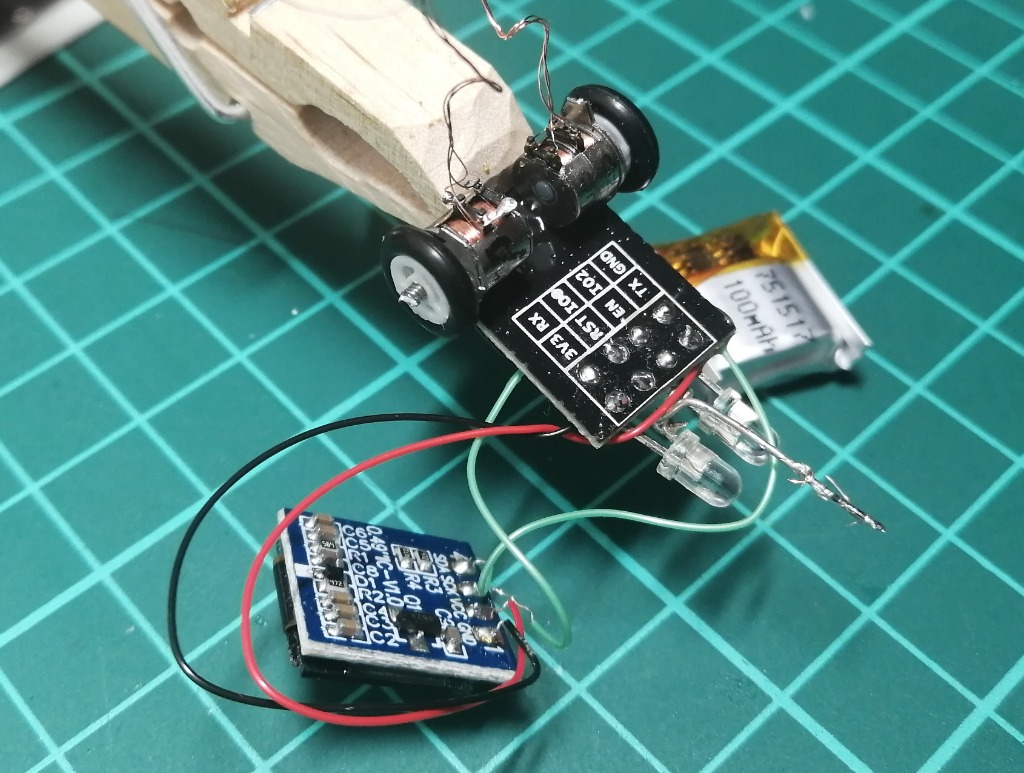
スマホで操縦できてWEBサーバーにもなる超小型ロボです。
モータードライバは使わず、マイコンのポートでモータを
駆動するなど小型化に工夫しています。



- 動画
-
- 開発素材
-
ツール
- システム構成
-
- ストーリー
-
- メンバー
-
-

- しん_2-41 @shinichi_nino
-
-
- 関連リンク
-

-
- 同じニオイがする作品
-
-
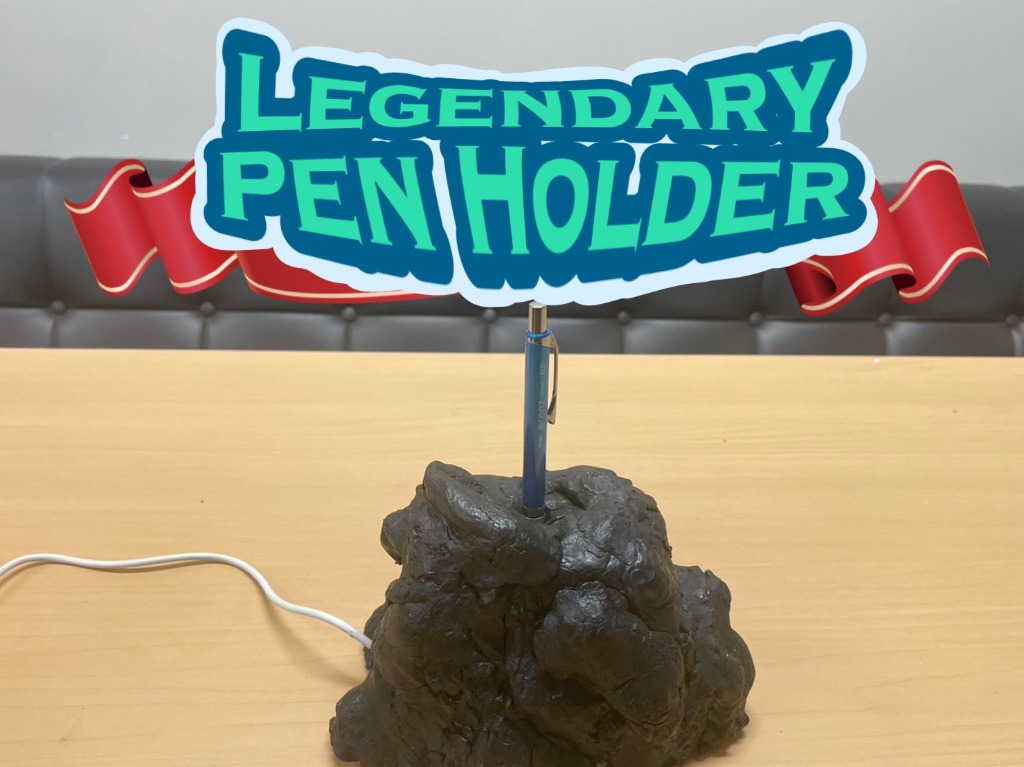 Legendary Pen Holder
Legendary Pen Holder
-
 【iOS対応】 連打機能付きマウスコントローラ
【iOS対応】 連打機能付きマウスコントローラ
-
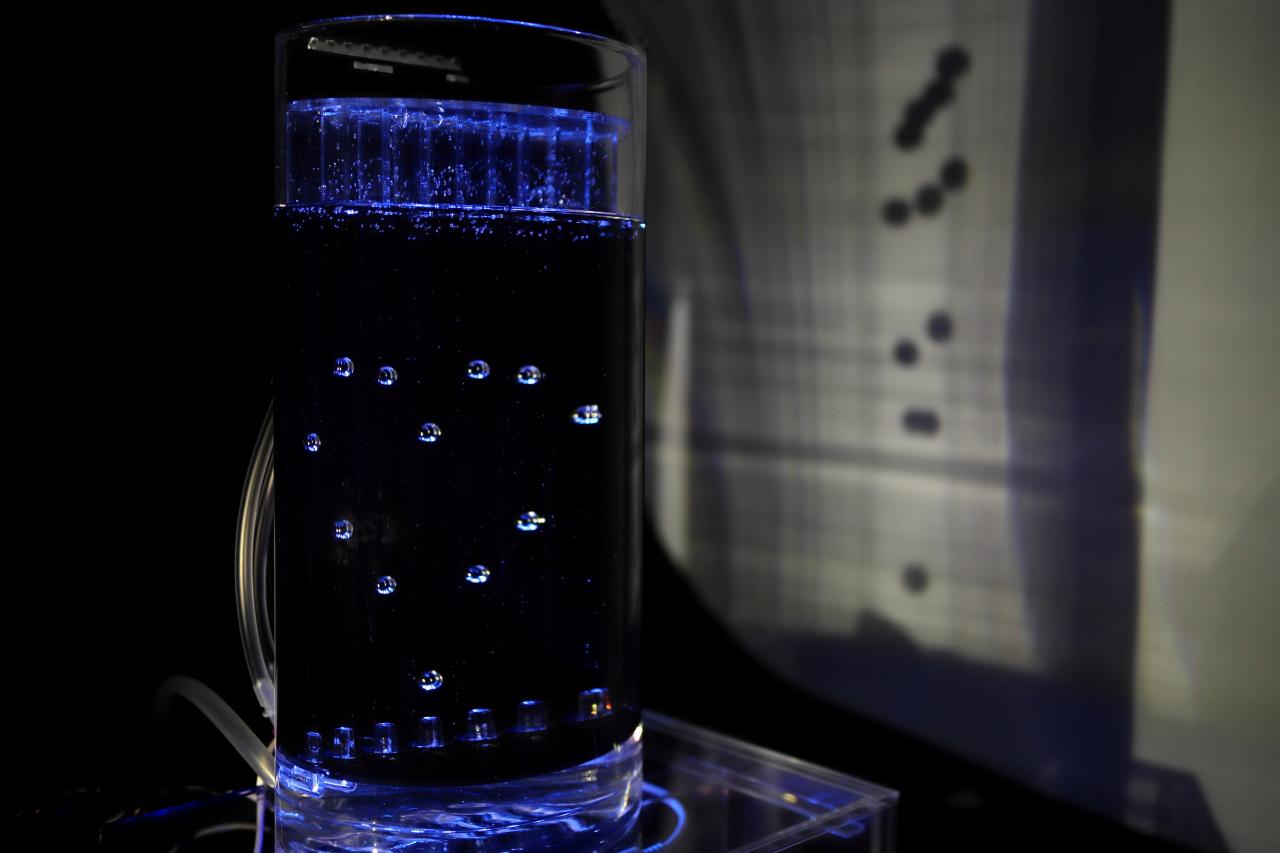 Glowing Air-Bubble Clock ver.2
Glowing Air-Bubble Clock ver.2
-
 世界最小クラス? 指乗りサイズ マイクロロボット
世界最小クラス? 指乗りサイズ マイクロロボット
-
Proto lovers ♥




