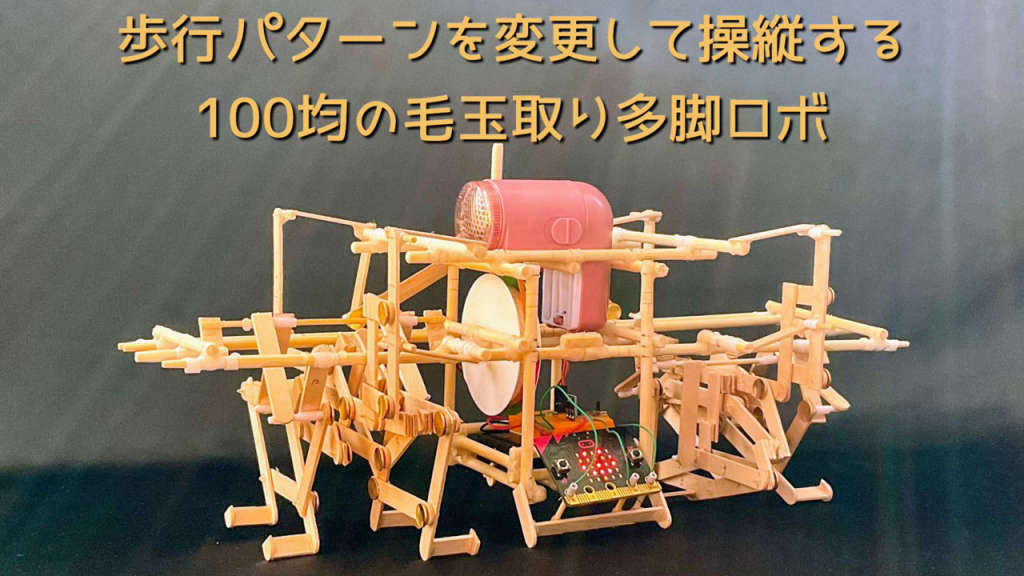
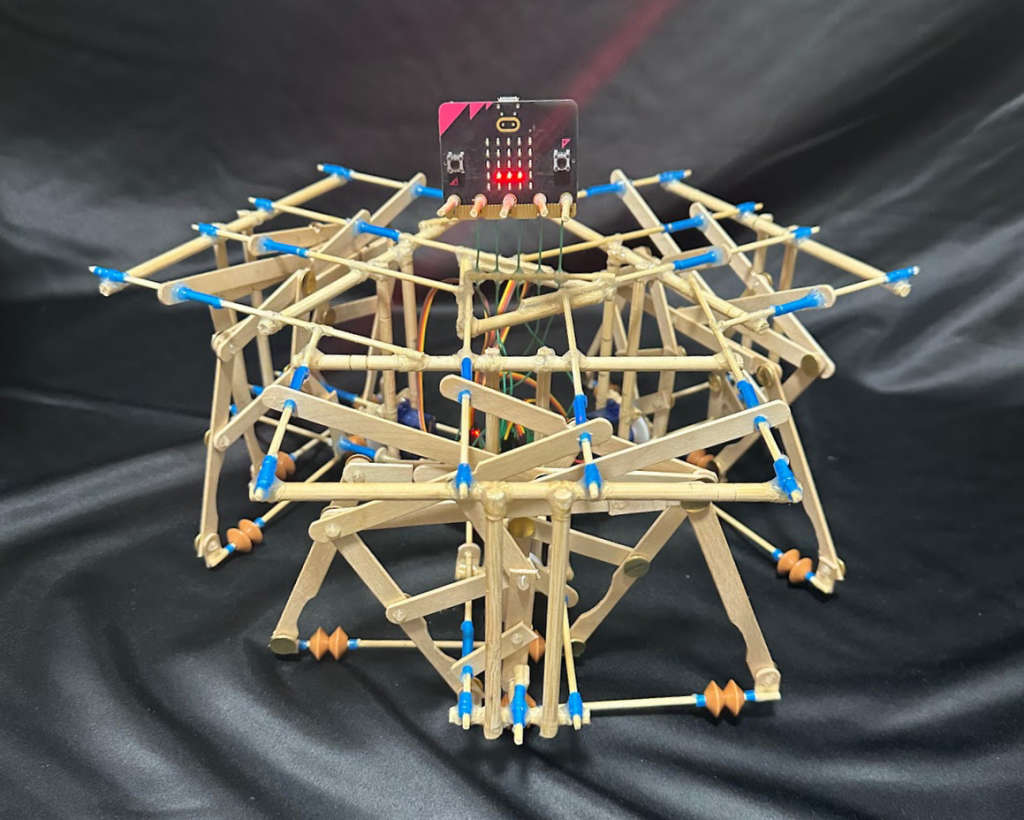
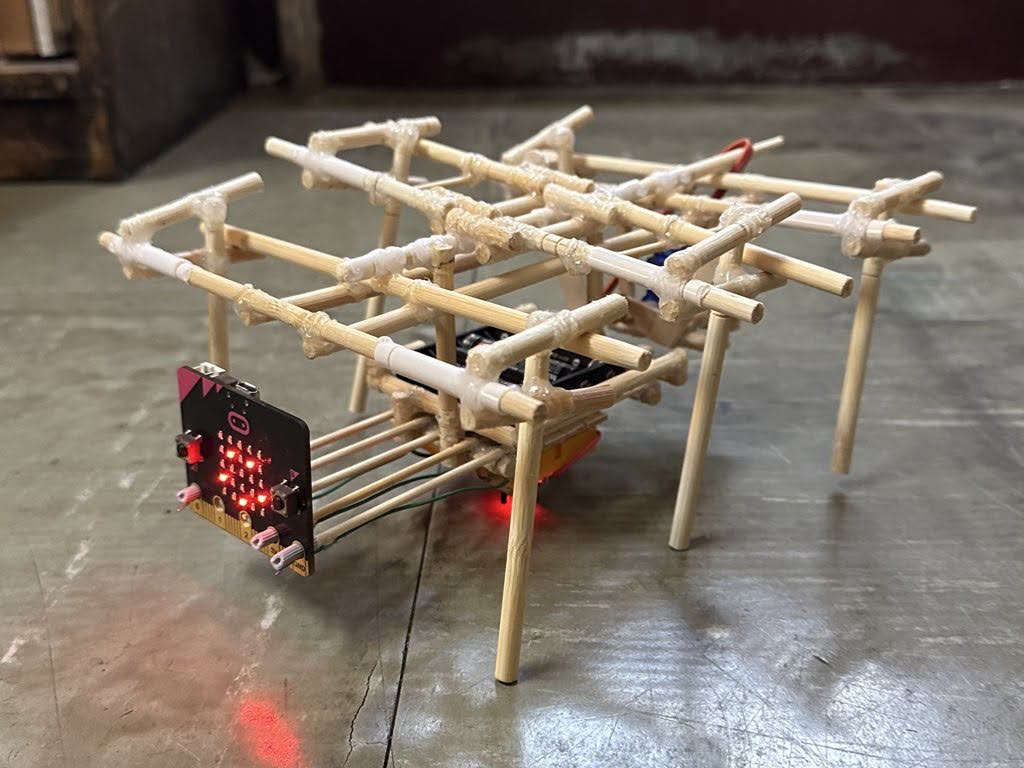
歩行パターンを変更して操縦する100均の毛玉取り多脚ロボ
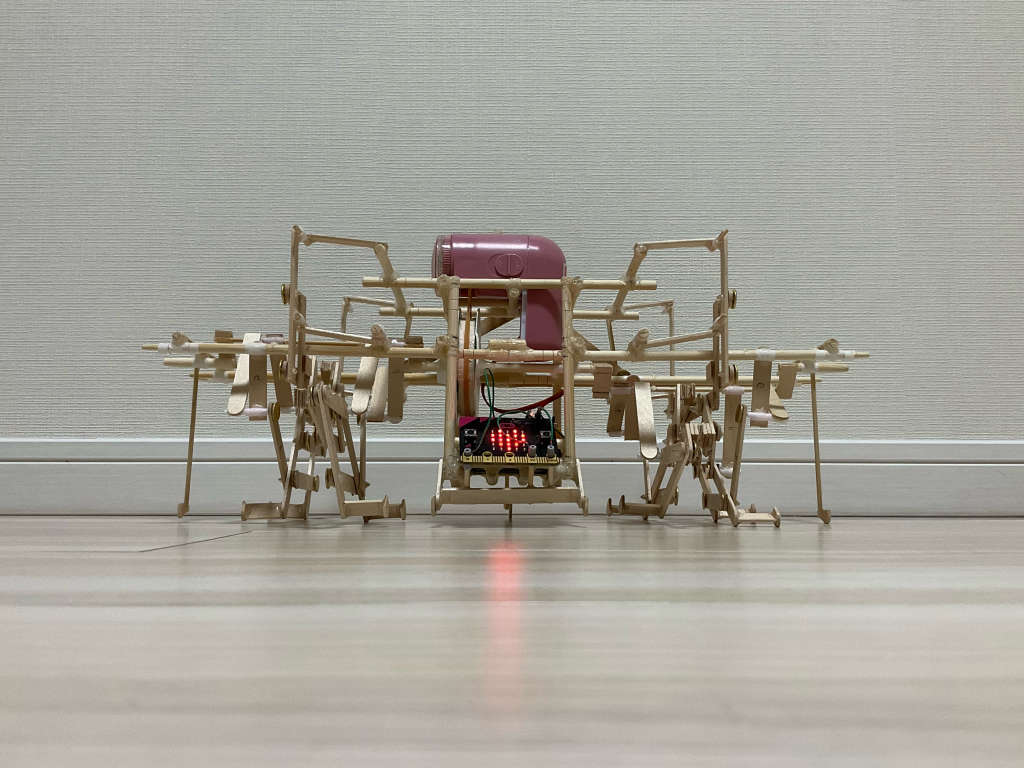
完成
© CC BY 4+
678
micro:bitでサーボモーター1個を制御し,歩行パターンを変更して操縦する毛玉取り多脚ロボ
- 動画
-
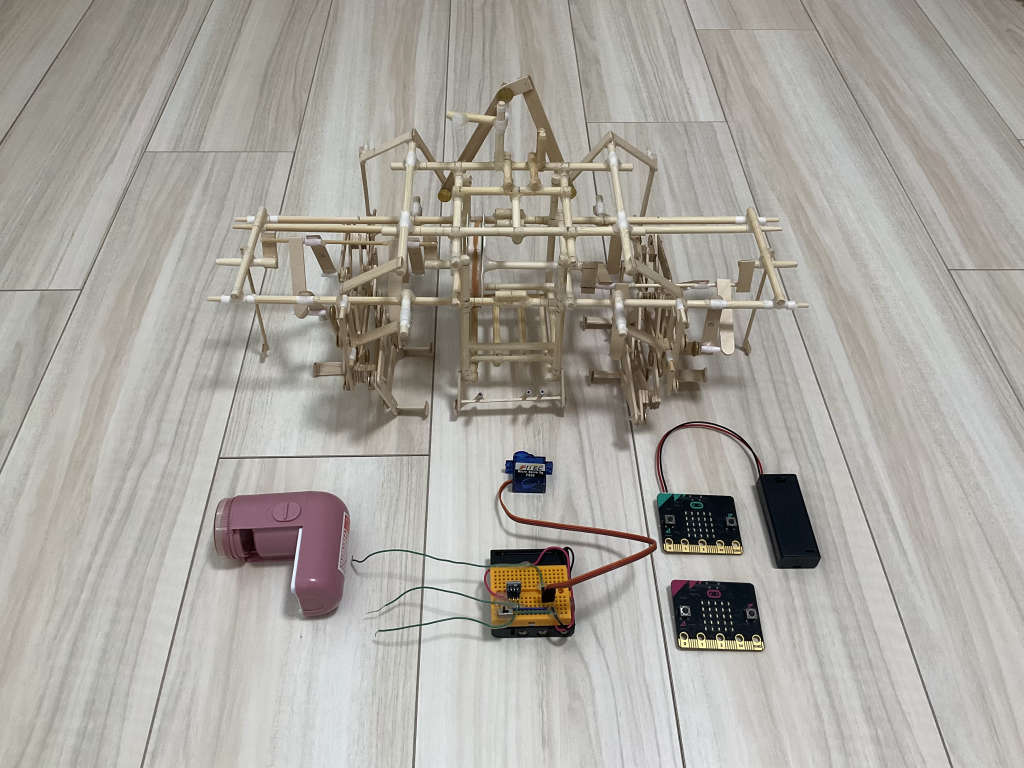
- 開発素材
-
デバイス
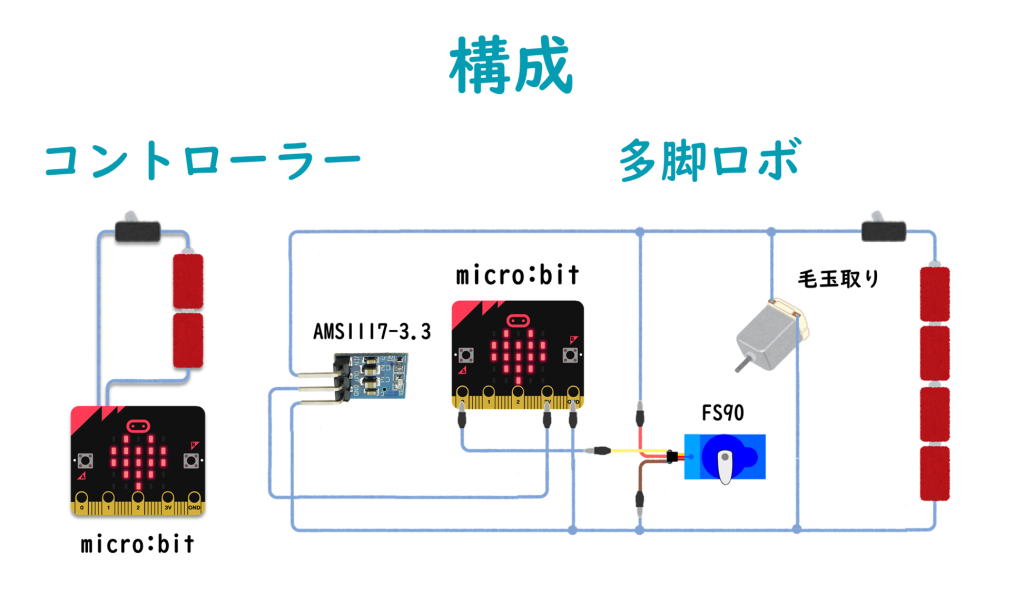
- システム構成
-
- ストーリー
-
- メンバー
-
-

- 片山 均@八幡浜の三瀬医院 @katabomb2
-
-
- 関連イベント
-
-
 Mouser Make Awards 20242024-04-01 開催
Mouser Make Awards 20242024-04-01 開催
-
- 関連リンク
-

-
-
-
- 同じニオイがする作品
-
-
 チェビシェフ横すべり脚で全方向移動&回転ロボ
チェビシェフ横すべり脚で全方向移動&回転ロボ
-
 M5Chicken (モーター1個でリモコン100均ロボ)
M5Chicken (モーター1個でリモコン100均ロボ)
-
 BDXドロイド(廉価版) / BDX Droid (Budget Version)
BDXドロイド(廉価版) / BDX Droid (Budget Version)
-
 激安!!シングルサーボリモコン多脚ロボ
激安!!シングルサーボリモコン多脚ロボ
-
Proto lovers ♥









機構すごい。(毛玉取り・・・?)
YouTubeで紹介させていただきました!
https://youtube.com/live/3y9U73L3z4k