リアルアバター くまりん
完成
© CC BY 4+
1762
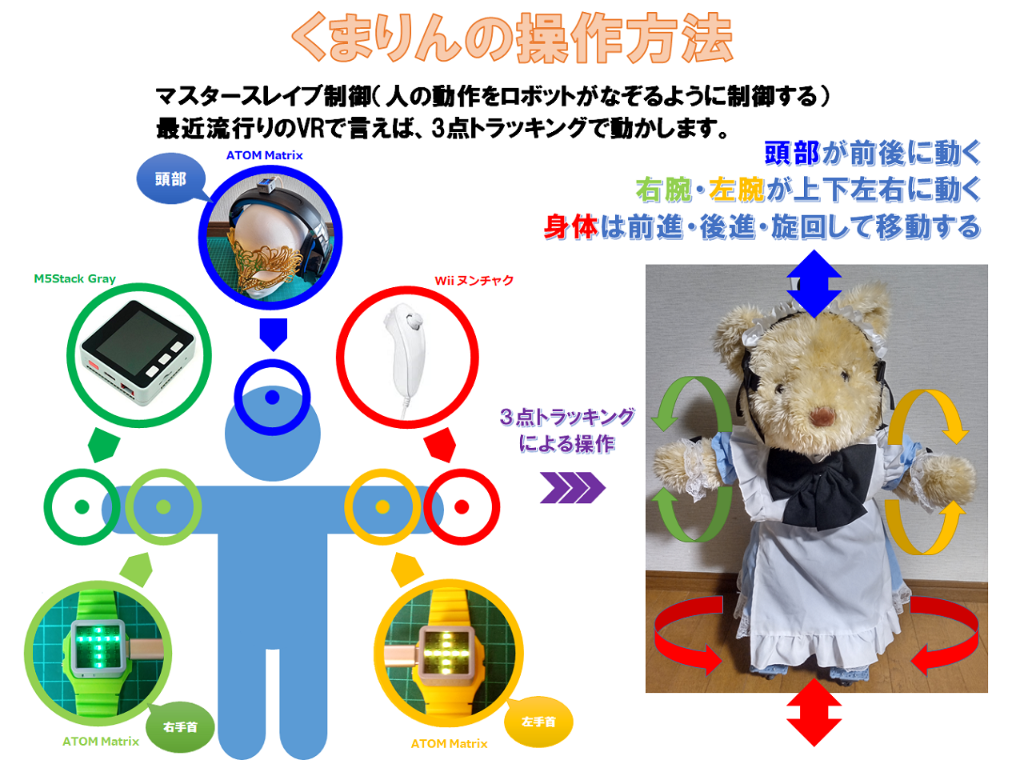
病気等々で身体が動けない時に、代わり動かすためのボディとしてロボット:リアルバターを作ってみました
部屋の大きさ問題も考慮して、人サイズではなく、大きいサイズのクマのぬいぐるみを動かすことにしました



- 動画
-
- 開発素材
-
デバイス
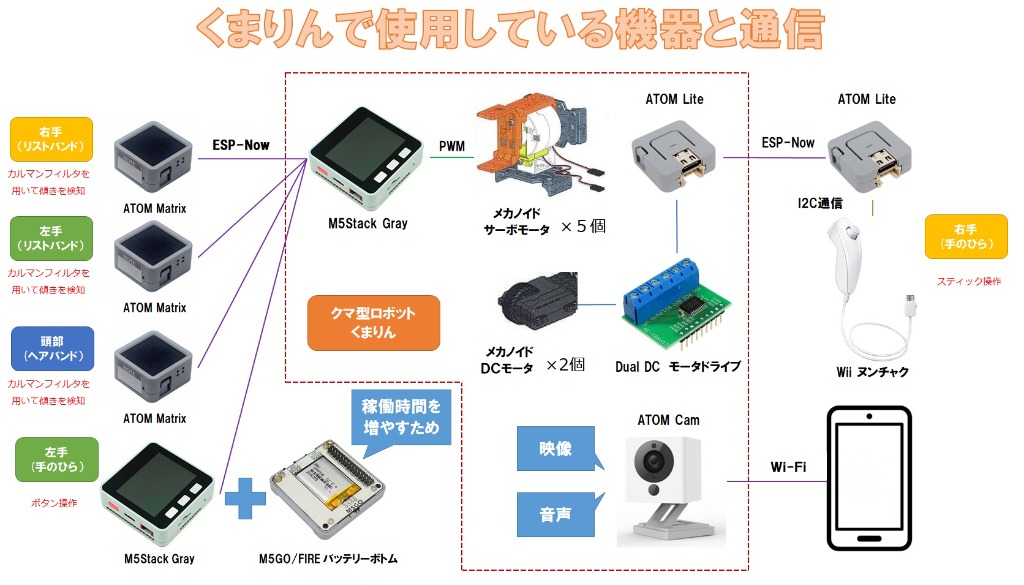
- システム構成
-
- ストーリー
-
- メンバー
-
くまりん
-

- あるば~と @albertlabo
-
- クリエータ
-
- 関連イベント
-
-
 ヒーローズ・リーグ オンライン20202020-09-07 開催
ヒーローズ・リーグ オンライン20202020-09-07 開催
-
 HLオンライン オレトク賞オンライン決勝2020-11-28 開催
HLオンライン オレトク賞オンライン決勝2020-11-28 開催
-
 HLオンライン2020 決勝2020-12-12 開催
HLオンライン2020 決勝2020-12-12 開催
-
 M5Stackハッカソン2020-09-19 開催
M5Stackハッカソン2020-09-19 開催
-
 NT金沢2023:出展作品(一部|非公式だよ)2023-06-17 開催
NT金沢2023:出展作品(一部|非公式だよ)2023-06-17 開催
-
- 同じニオイがする作品
-
-
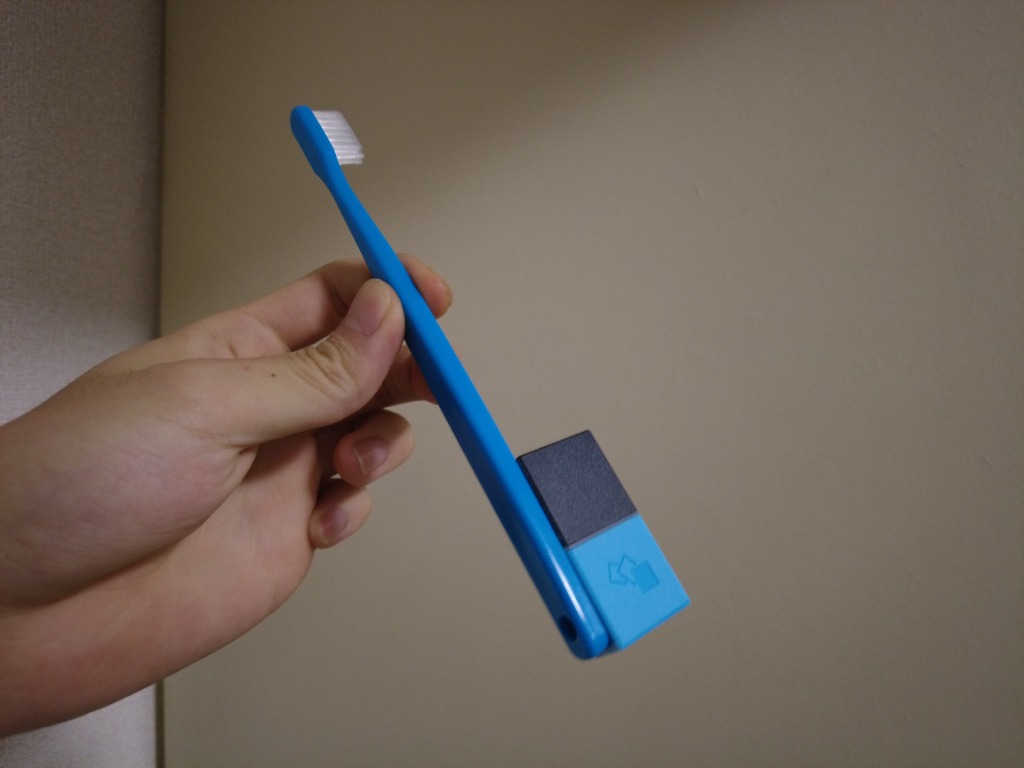 歯を磨かないと、アラームが止まらないヨ「二度寝防止システム」
歯を磨かないと、アラームが止まらないヨ「二度寝防止システム」
-
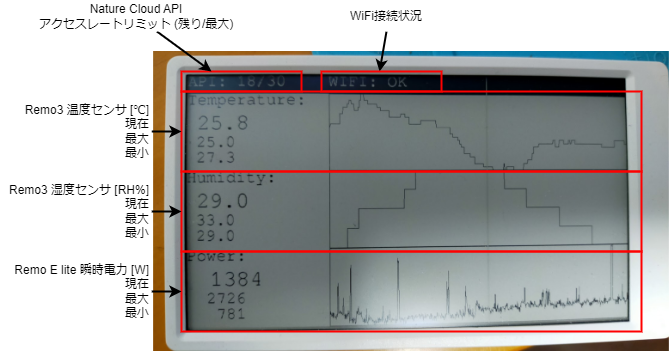 M5Stack Monitor for Nature Remo series
M5Stack Monitor for Nature Remo series
-
 歩行リハビリエンタメシステム Melody Shoes
歩行リハビリエンタメシステム Melody Shoes
-
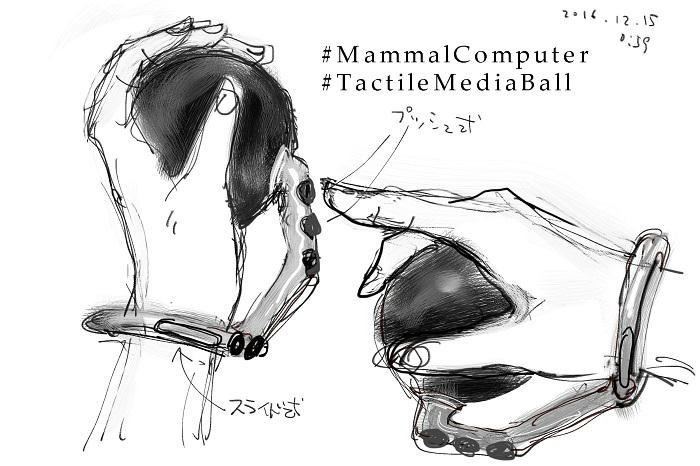 次世代のコンピュータ入力装置 ママルコンピュータ
次世代のコンピュータ入力装置 ママルコンピュータ
-
Proto lovers ♥










くまりんパワーアップしてる!
(え、本体出てしまってよかったの?笑)
結構正確にトラッキングしていてすごい。
動画後編、、くまりんがキャタピラで移動しているよ。
暗闇にいくとナイトビジョンに切り替わるカメラなど、無駄(語弊)に高度な実装が素晴らしい。
見た目が圧倒的可愛さ。ずるい!
触り心地が気になります。。。
3点だけのトラッキングを、人間とは関節の動きが違うロボットで同じように動かすには腕を上げ下げする動きだけでも、2つの軸のサーボをそれっぽく制御しないと同じようには動かないのに、ラジオ体操までしちゃうとは驚きです♪