サタデー
アイデア
© CC BY 4+
1085

- 動画
-
- ストーリー
-
- メンバー
-
サンデー
-

- 福間 健二 @kenjifukuma
-
-
- 関連イベント
-
-
 ヒーローズ・リーグ20192019-09-07 開催
ヒーローズ・リーグ20192019-09-07 開催
-
 ヒーローズ・リーグ2019 MAリーグ決勝2019-12-07 開催
ヒーローズ・リーグ2019 MAリーグ決勝2019-12-07 開催
-
- 同じニオイがする作品
-
-
 CryingBaby (day 0)
CryingBaby (day 0)
-
 宇宙海賊王に俺は+スロットルコントローラ+サイバーチック発射ボタン
宇宙海賊王に俺は+スロットルコントローラ+サイバーチック発射ボタン
-
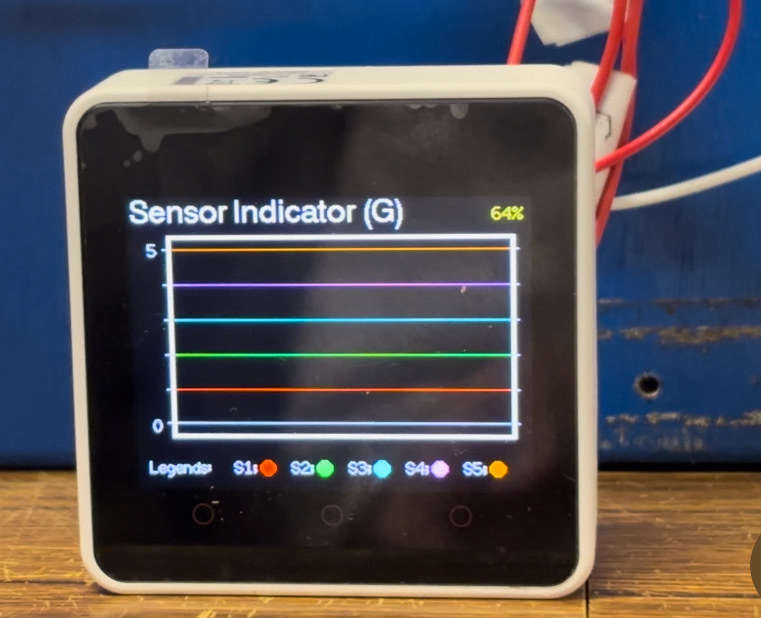 Photo Sensor Indicator
Photo Sensor Indicator
-
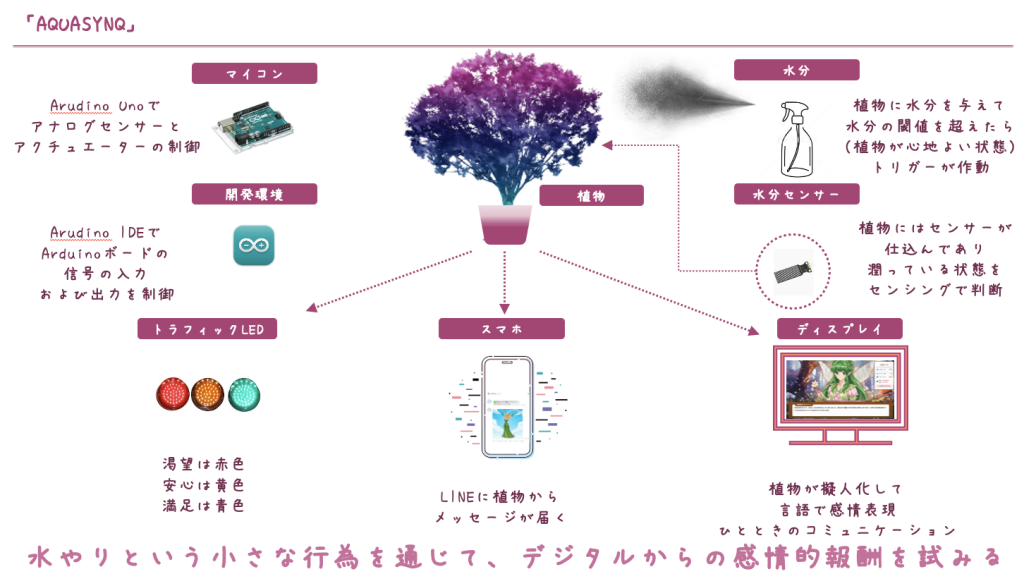 AquaSync
AquaSync
-

