サタデー
アイデア
© CC BY 4+
1083

- 動画
-
- ストーリー
-
- メンバー
-
サンデー
-

- 福間 健二 @kenjifukuma
-
-
- 関連イベント
-
-
 ヒーローズ・リーグ20192019-09-07 開催
ヒーローズ・リーグ20192019-09-07 開催
-
 ヒーローズ・リーグ2019 MAリーグ決勝2019-12-07 開催
ヒーローズ・リーグ2019 MAリーグ決勝2019-12-07 開催
-
- 同じニオイがする作品
-
-
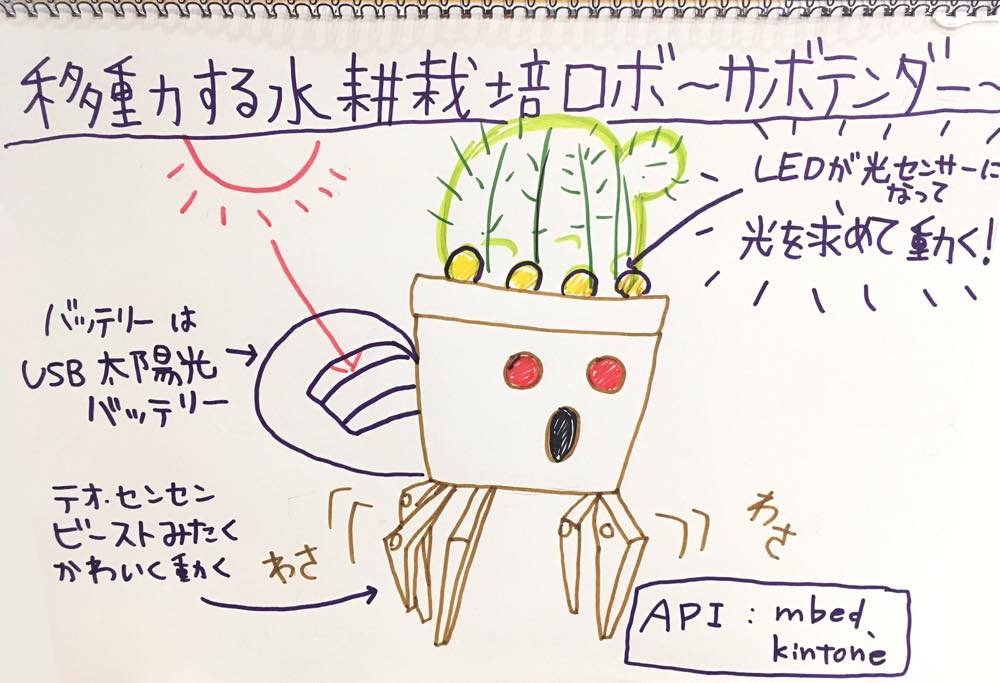 ヒボたん 〜 移動式植物栽培ロボット 〜
ヒボたん 〜 移動式植物栽培ロボット 〜
-
 多機能学習タイマー ~学年イチの成績を目指して~
多機能学習タイマー ~学年イチの成績を目指して~
-
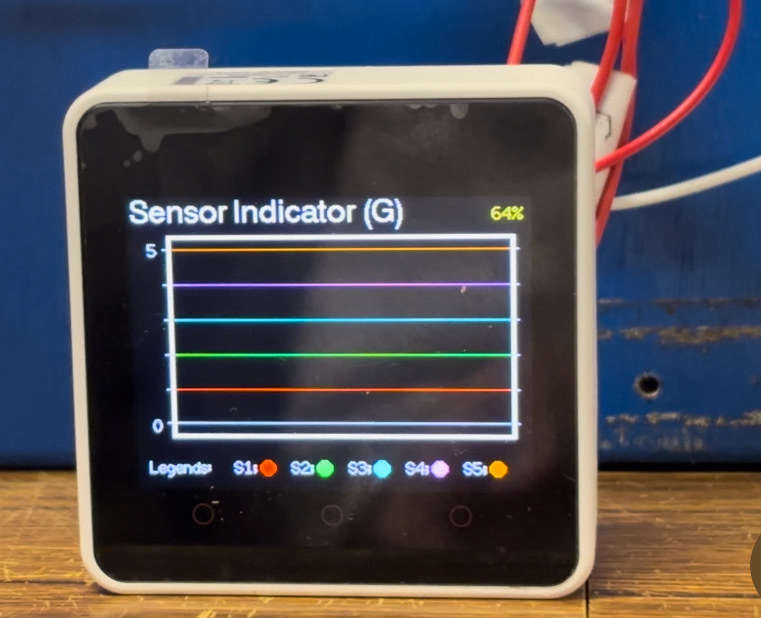 Photo Sensor Indicator
Photo Sensor Indicator
-
 アニマルメジャー装置 – 1D(イチ次元)Edition
アニマルメジャー装置 – 1D(イチ次元)Edition
-

