ドローン ver2 RE
完成
752
完成
752
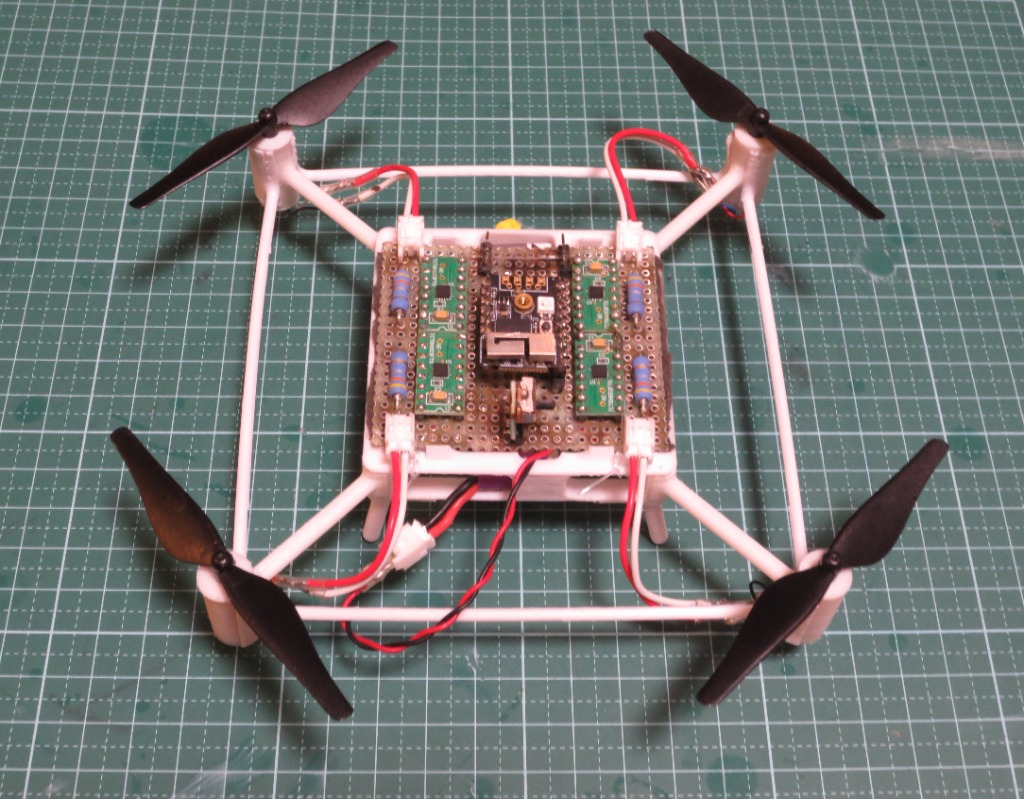
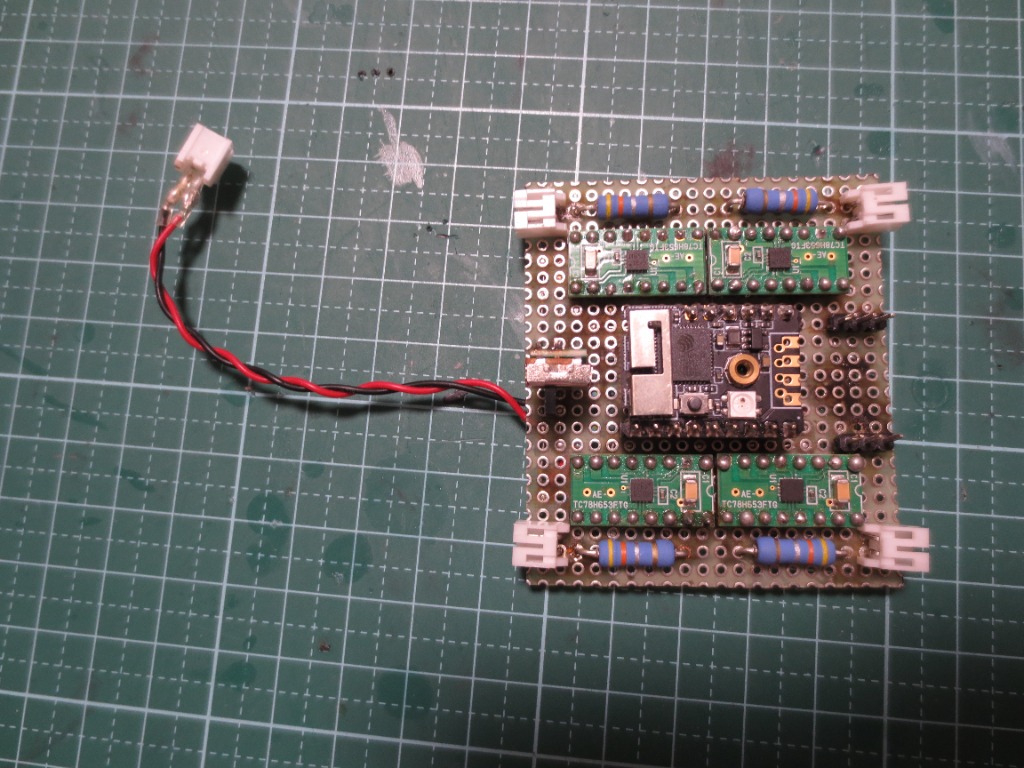
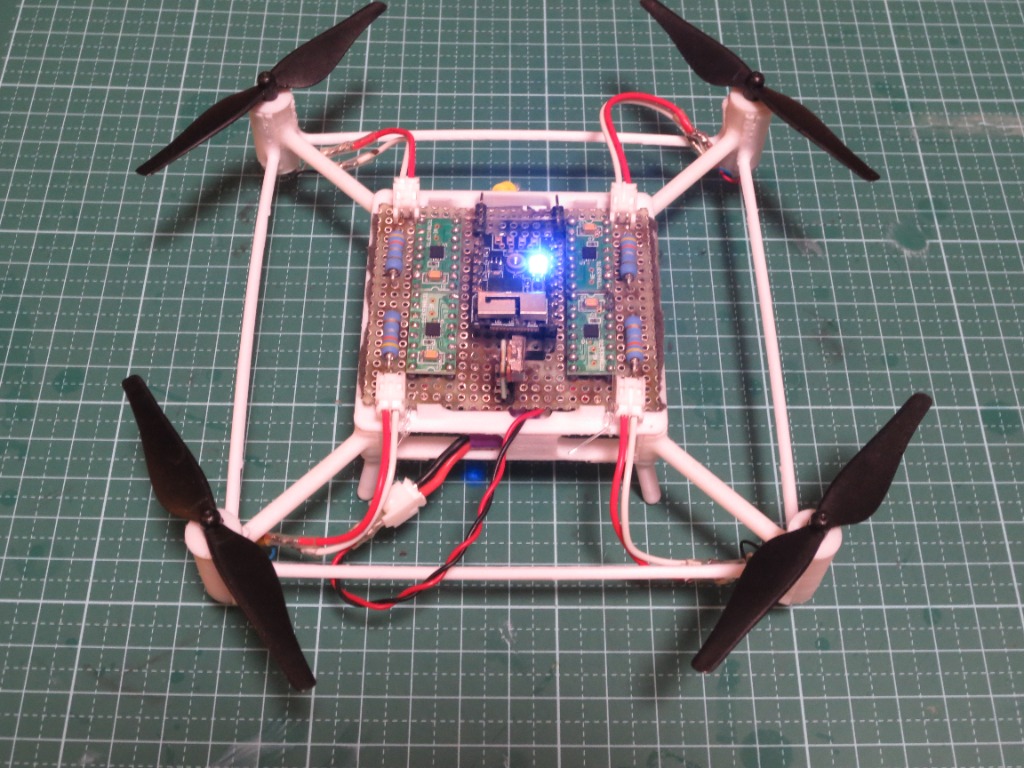
M5Stamp Pico Mateを使用した小型ドローンです。
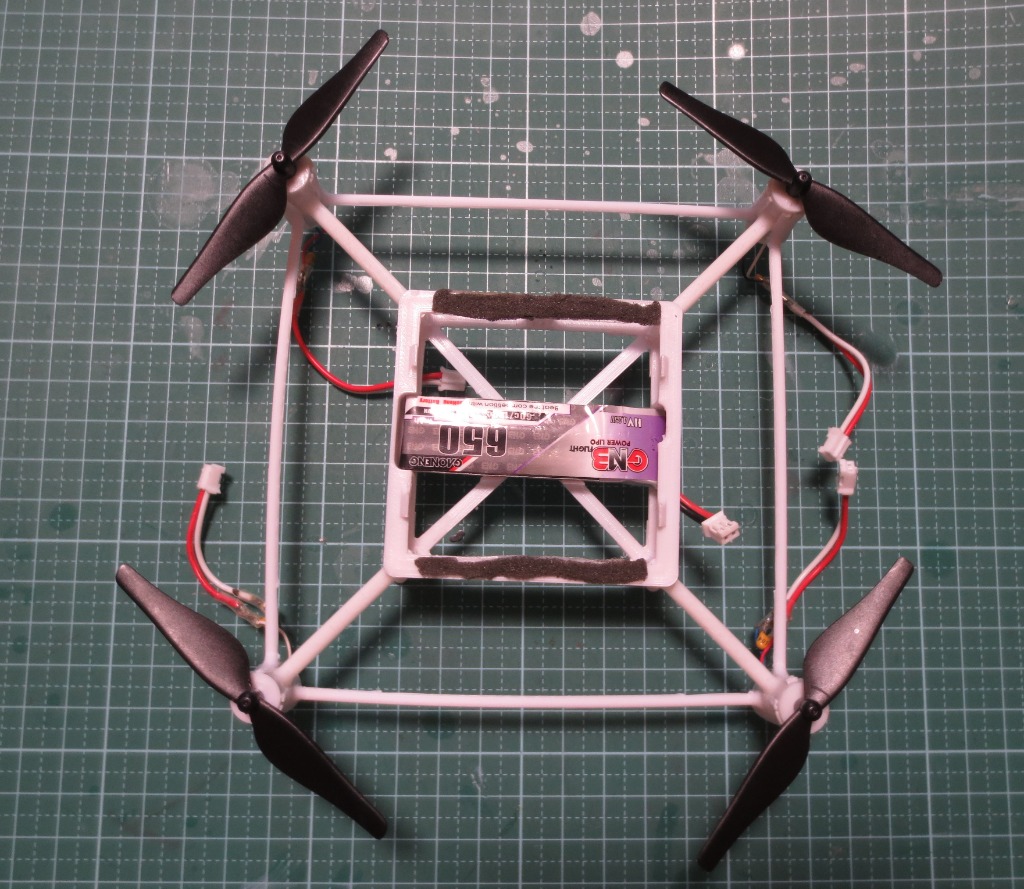
重量:76.8g
寸法:縦:125mm 横:125mm 高さ:45mm(プロペラ無し時)

- 動画
-
- 開発素材
-
ツール
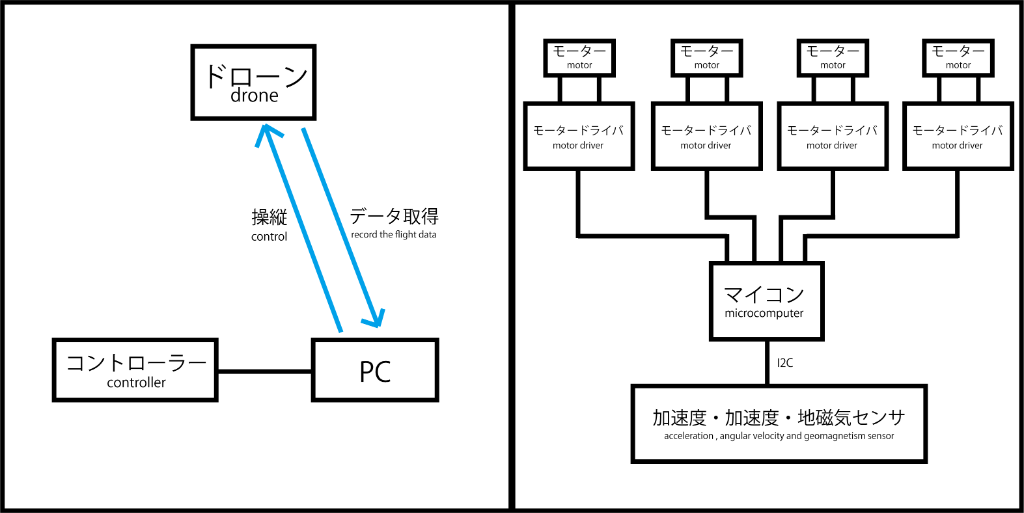
- システム構成
-
- ストーリー
-
- メンバー
-
-
- watayun @watayun
-
- 製作者
-
- 関連イベント
-
-
 M5Stack Japan Creativity Contest 20232023-07-15 開催
M5Stack Japan Creativity Contest 20232023-07-15 開催
-
- 同じニオイがする作品
-
-
 opniz
opniz
-
 自作PICライタ ーXIAO RP2040(or ESP32S3)を用いてPICマイコンに書き込むー
自作PICライタ ーXIAO RP2040(or ESP32S3)を用いてPICマイコンに書き込むー
-
 M5Stack WiFi Uploader
M5Stack WiFi Uploader
-
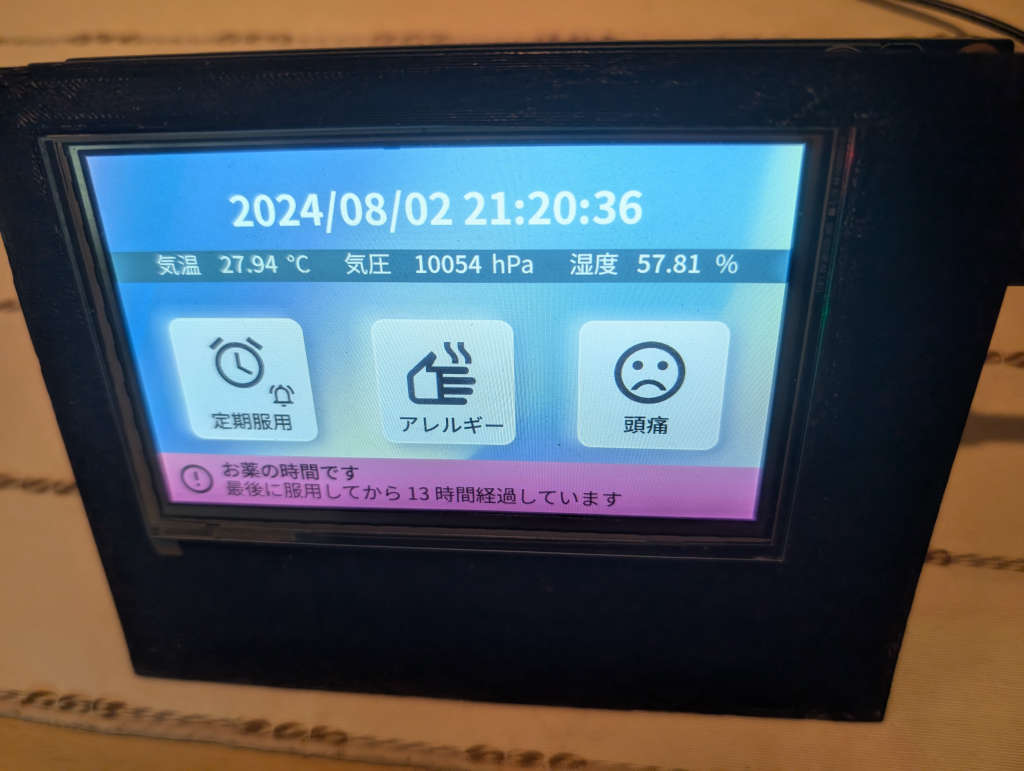 私の服薬システム~STM32マイコンでタッチ入力・アラート表示~
私の服薬システム~STM32マイコンでタッチ入力・アラート表示~
-
Proto lovers ♥