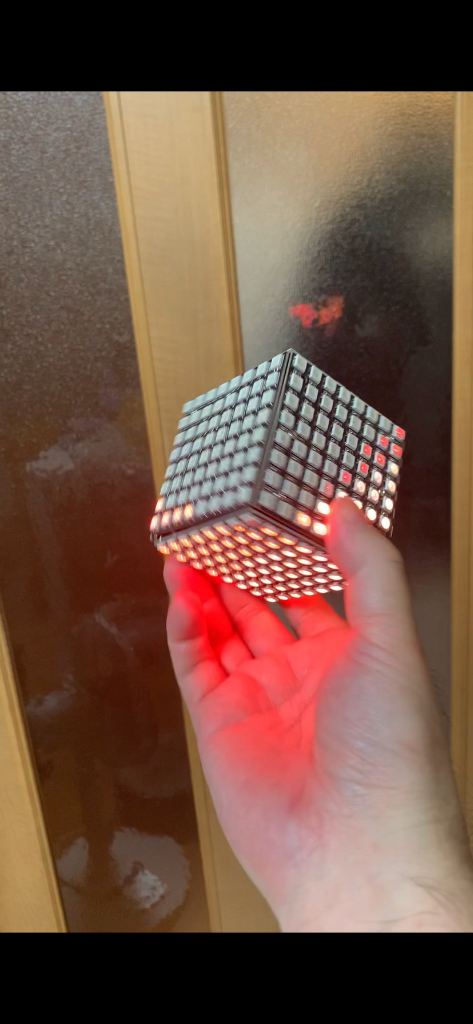
センサ連動型球体ディスプレイ
開発中
© CC BY 4+
549
以前から球体ディスプレイを作成しており、その中で実装したいと思っていた機能です。
センサに連動して「起き上がり小法師」のように球体を回転させてもいつも同じ向きに画像が表示されるデバイスを作りました。


- 動画
-
- 開発素材
-
- システム構成
-
- ストーリー
-
- メンバー
-
-

- yakatano @yasuokatano
-
-
- 関連イベント
-
-
 ヒーローズ・リーグ 20232023-08-28 開催
ヒーローズ・リーグ 20232023-08-28 開催
-
 「Maker Faire Tokyo 2023」の出展作品まとめ(一部だよ|非公式だよ)2023-10-14 開催
「Maker Faire Tokyo 2023」の出展作品まとめ(一部だよ|非公式だよ)2023-10-14 開催
-
- 関連リンク
-

-
-
- 同じニオイがする作品
-
-
 M5Stack Light Sword with Image Effects(光る剣とエフェクト)
M5Stack Light Sword with Image Effects(光る剣とエフェクト)
-
 宇宙海賊王に俺は+スロットルコントローラ+サイバーチック発射ボタン
宇宙海賊王に俺は+スロットルコントローラ+サイバーチック発射ボタン
-
 陣痛共有デバイス「Happy Pain」
陣痛共有デバイス「Happy Pain」
-
 MINI LED BADGE
MINI LED BADGE
-
Proto lovers ♥








私のこの作品➡ https://protopedia.net/prototype/4036 とコラボしてみたい感じの作品です‼
POVディスプレイを使ったときの問題が何なのかによりますが、もしかしたら相性はいいかもです・・・
POVの問題は問題が起きた時にPOVなのか表示なのかわからなくなりそうだったので、切り分けた感じですね
180面体の記事は見ています。いいですね!応援してます!
https://youtu.be/XmYEYDNQFKM?feature=shared