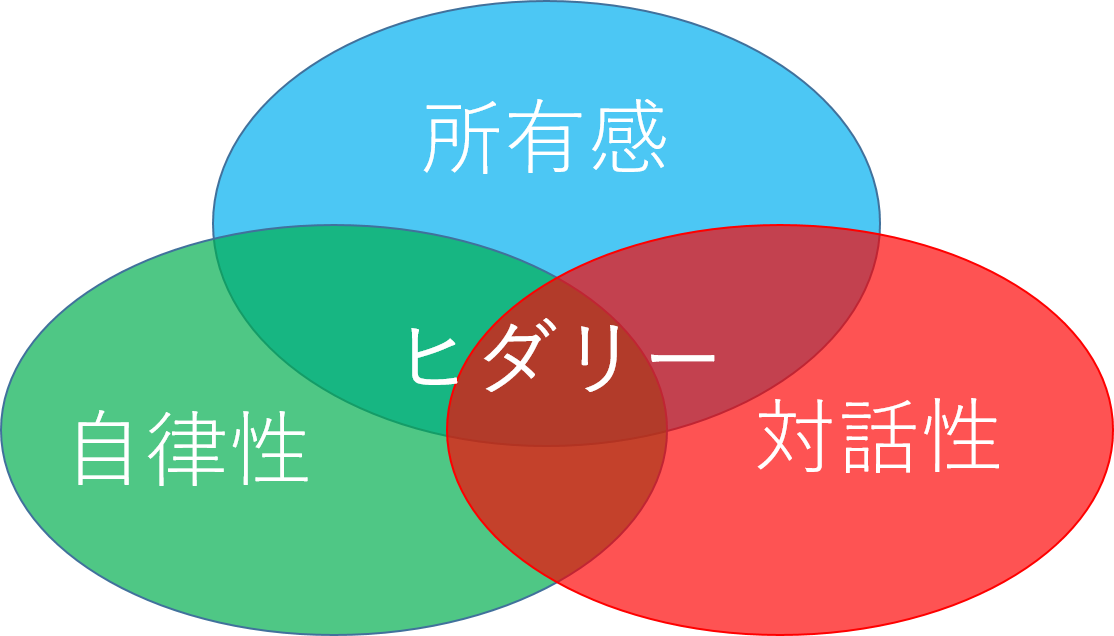
寄生ロボット「ヒダリー」
開発中
© CC BY 4+
597
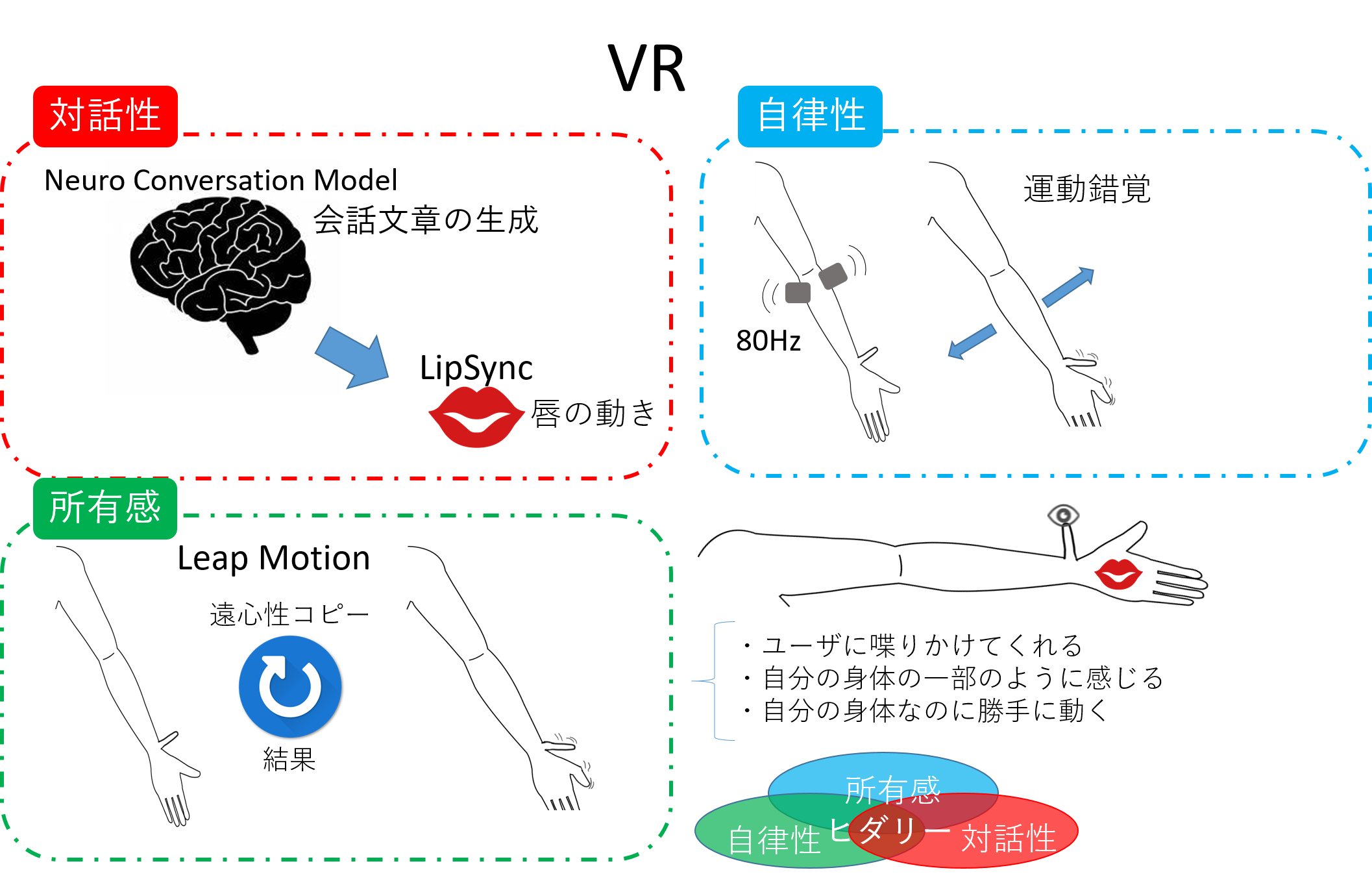

- 開発素材
-
- ストーリー
-
- メンバー
-
寄生獣フレンズ
-

- @akimioyanagi
-
- 企画,エンジニア
-
- 同じニオイがする作品
-
-
 花看破
花看破
-
 MINOSAMA 〜教えて みのさん〜
MINOSAMA 〜教えて みのさん〜
-
 イベントでゲットしたおみやげで工作する
イベントでゲットしたおみやげで工作する
-
 犬も歩けばトークンを掘れる
犬も歩けばトークンを掘れる
-

