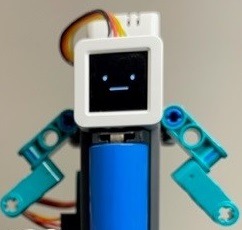
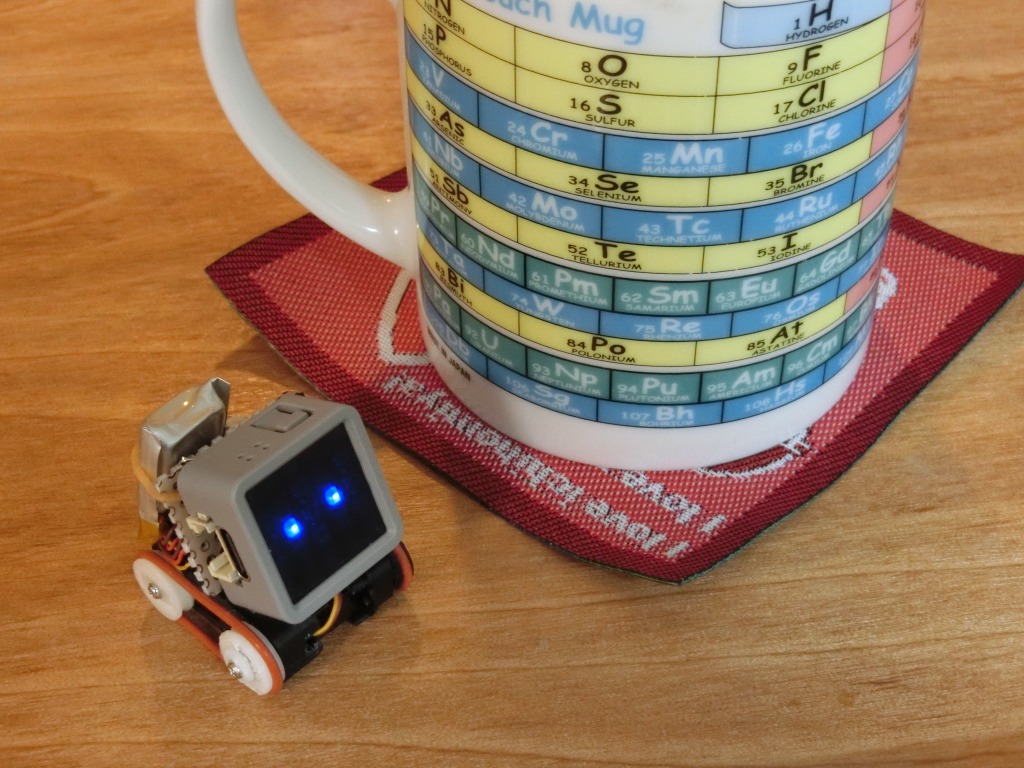
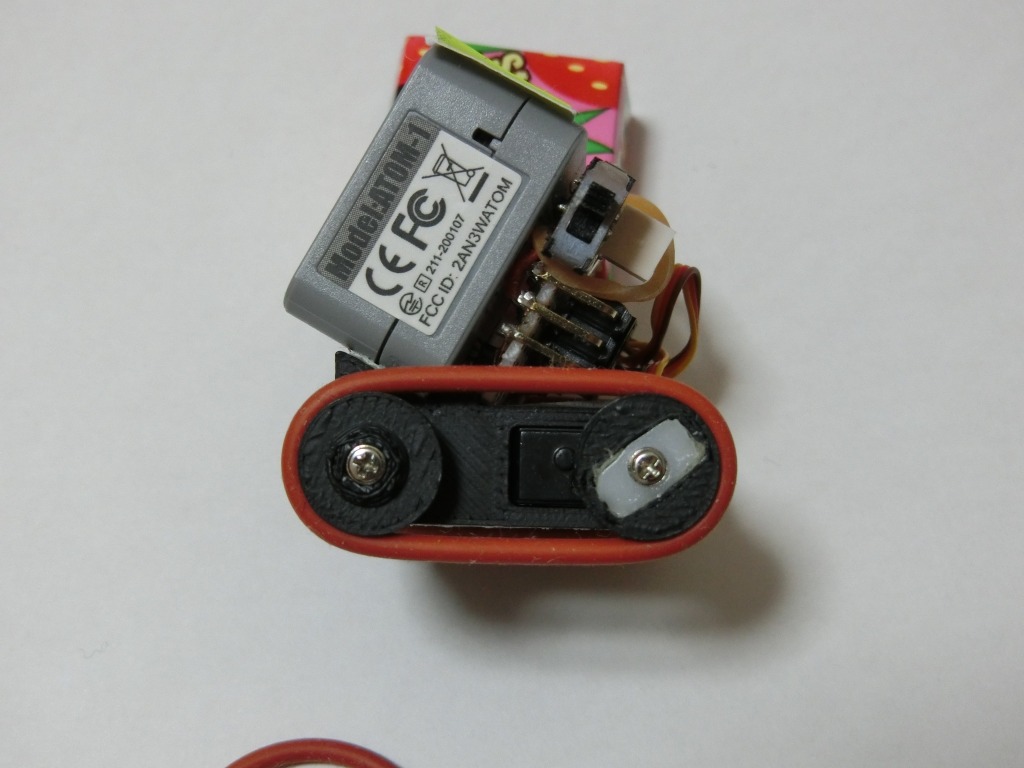
M5ATOM Matrixを使ったクローラ台車型ロボット
完成
1615
完成
1615
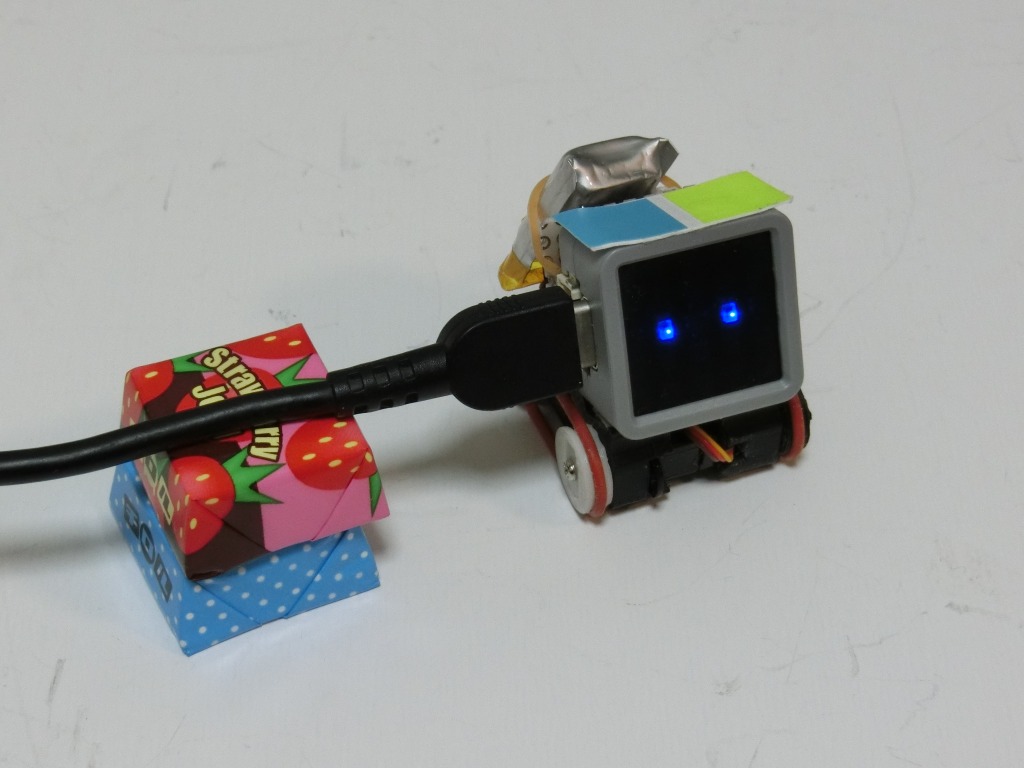
40mm角に収まる小型のクローラ台車型ロボット。無線通信を介して、ゲームコントローラーによる操縦や、自動制御プログラムによる動作が可能です。
- 動画
-
- 開発素材
-
デバイス
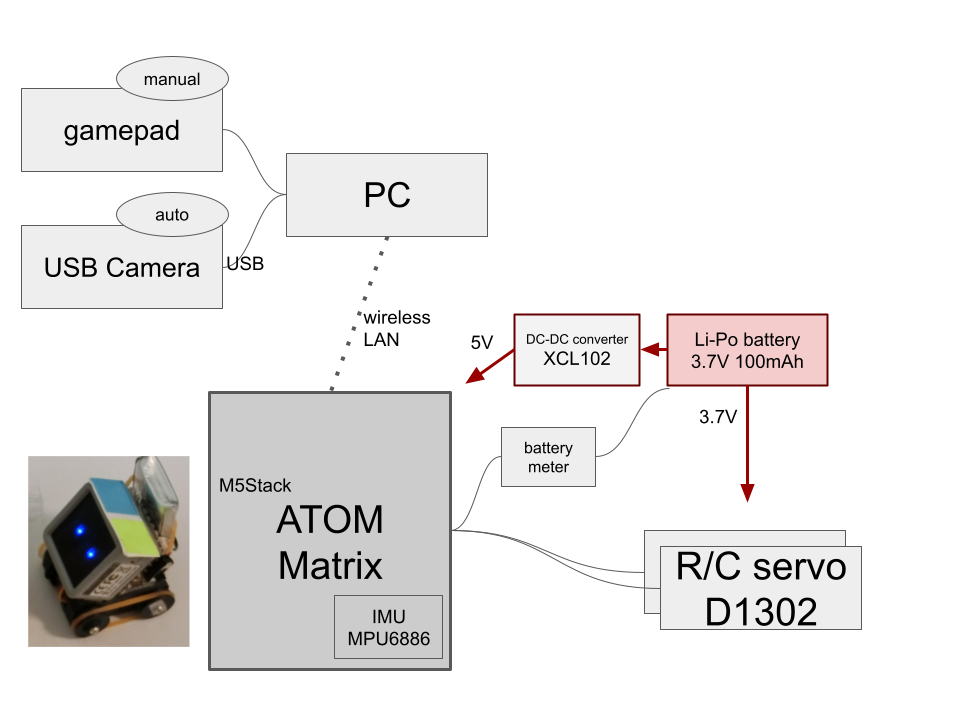
- システム構成
-
- ストーリー
-
- メンバー
-
-

- 山口辰久 @qzy13700
-
-
- 関連イベント
-
-
 M5Stack Japan Creativity Contest 20222022-07-15 開催
M5Stack Japan Creativity Contest 20222022-07-15 開催
-
 「Ogaki Mini Maker Faire 2022」の出展作品まとめ(一部だよ|非公式だよ)2022-12-03 開催
「Ogaki Mini Maker Faire 2022」の出展作品まとめ(一部だよ|非公式だよ)2022-12-03 開催
-
 ヒーローズ・リーグ 20242024-09-02 開催
ヒーローズ・リーグ 20242024-09-02 開催
-
- 同じニオイがする作品
-
-
 Boundary Blur:球体型ロボットと複合現実を活用したマルチエージェントシステム
Boundary Blur:球体型ロボットと複合現実を活用したマルチエージェントシステム
-
 クルマ、子供の命を守るレーダーセンサーシステム RCS-01
クルマ、子供の命を守るレーダーセンサーシステム RCS-01
-
 【簡単スマート管理システム】スマぽち
【簡単スマート管理システム】スマぽち
-
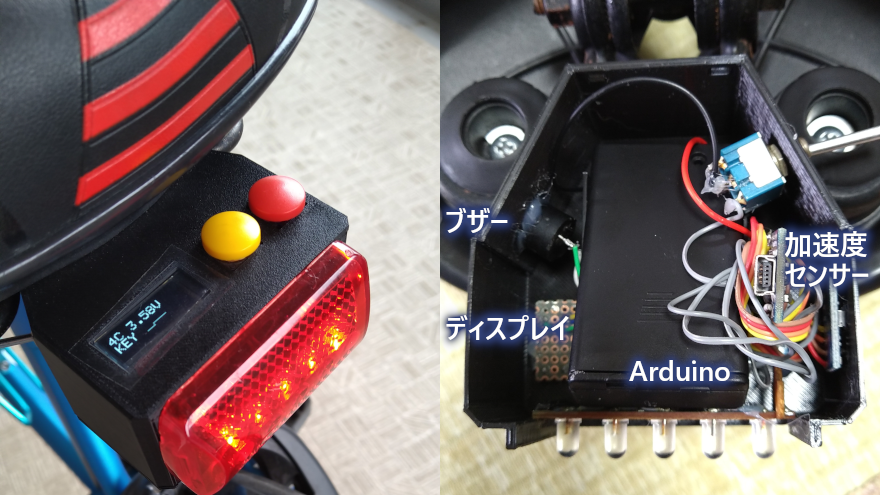 多機能!自転車用テールランプ
多機能!自転車用テールランプ
-
Proto lovers ♥