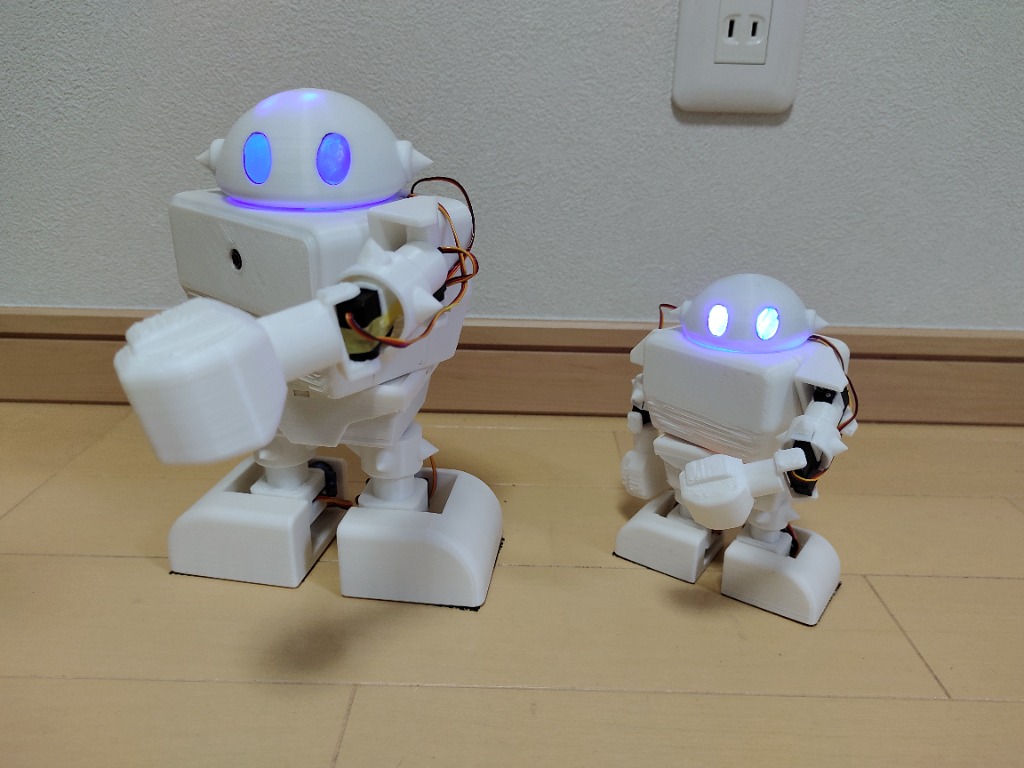
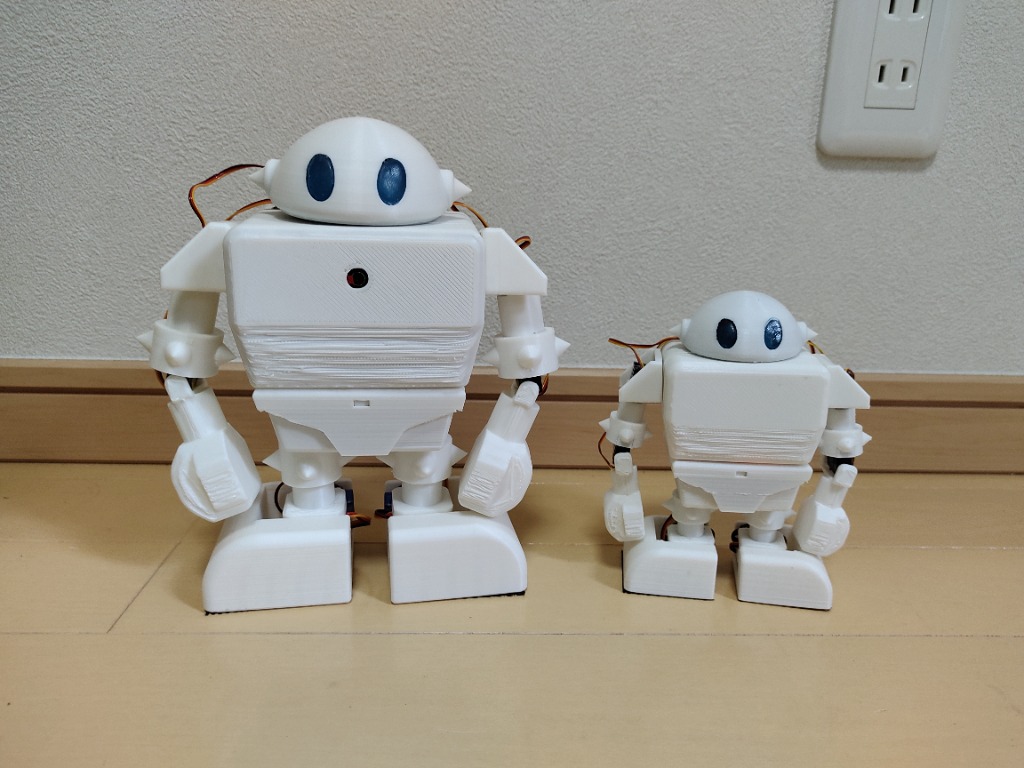
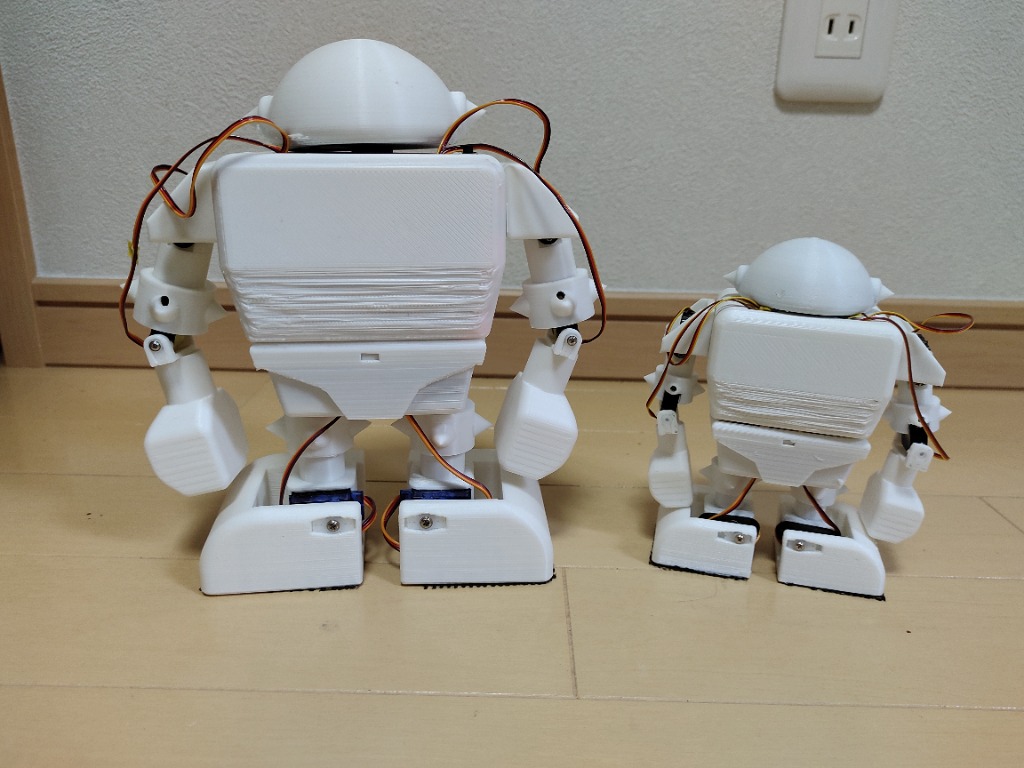
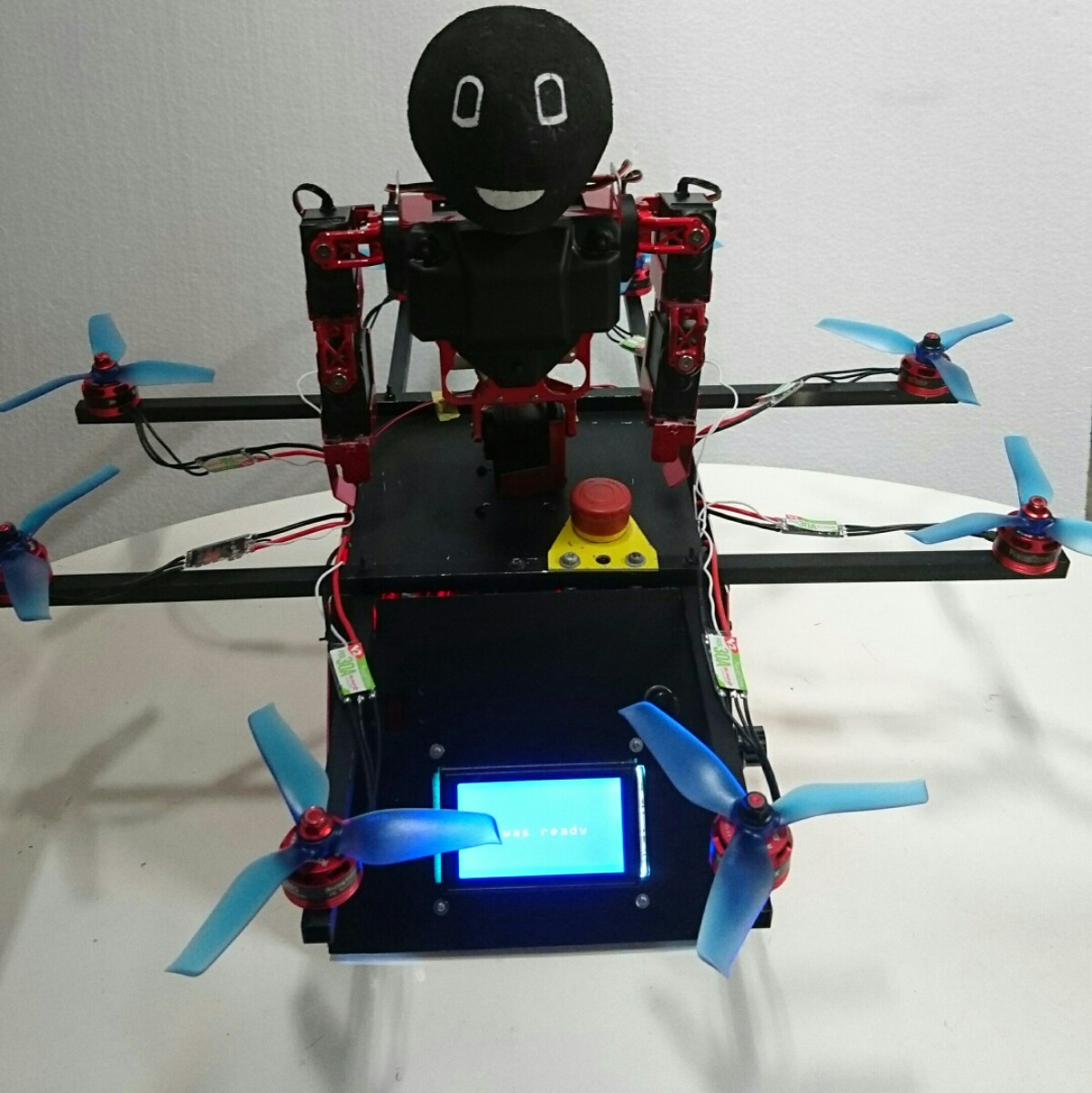
多関節デフォルメロボット「パワー君」と「パワー君mini」
完成
© CC BY 4+
1149
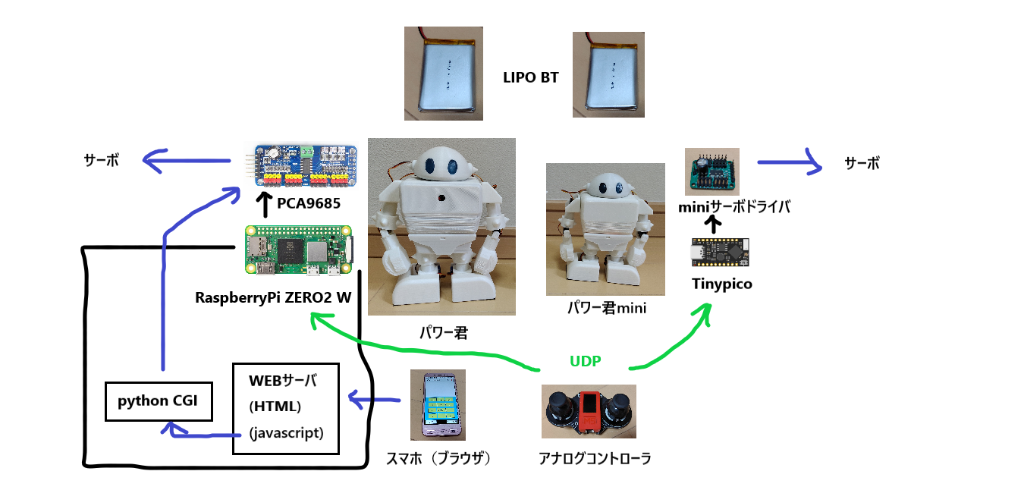
サーボモーターを12個使用した関節多めのデフォルメロボット「パワー君」です。小型のパワー君miniも作成しました。歩行だけではなく関節各部の動作やカメラ映像の機能もあります。


- 動画
-
- 開発素材
-
デバイス
- システム構成
-
- ストーリー
-
- メンバー
-
-
- ロビヲ @ketunorobio
-
-
- 関連イベント
-
-
 Mouser Make Awards 20232023-05-01 開催
Mouser Make Awards 20232023-05-01 開催
-
 ヒーローズ・リーグ 20232023-08-28 開催
ヒーローズ・リーグ 20232023-08-28 開催
-
 NT金沢2024:出展作品(一部|非公式だよ)2024-06-22 開催
NT金沢2024:出展作品(一部|非公式だよ)2024-06-22 開催
-
 つくろか!3 〜よみがえれ、ものづくり百鬼夜行〜2024-10-26 開催
つくろか!3 〜よみがえれ、ものづくり百鬼夜行〜2024-10-26 開催
-
 つくろがや!32025-04-12 開催
つくろがや!32025-04-12 開催
-
- 関連リンク
-

-
- 同じニオイがする作品
-
-
 ぶらっくぺっぱー
ぶらっくぺっぱー
-
 ChanJar(チェンジャー)
ChanJar(チェンジャー)
-
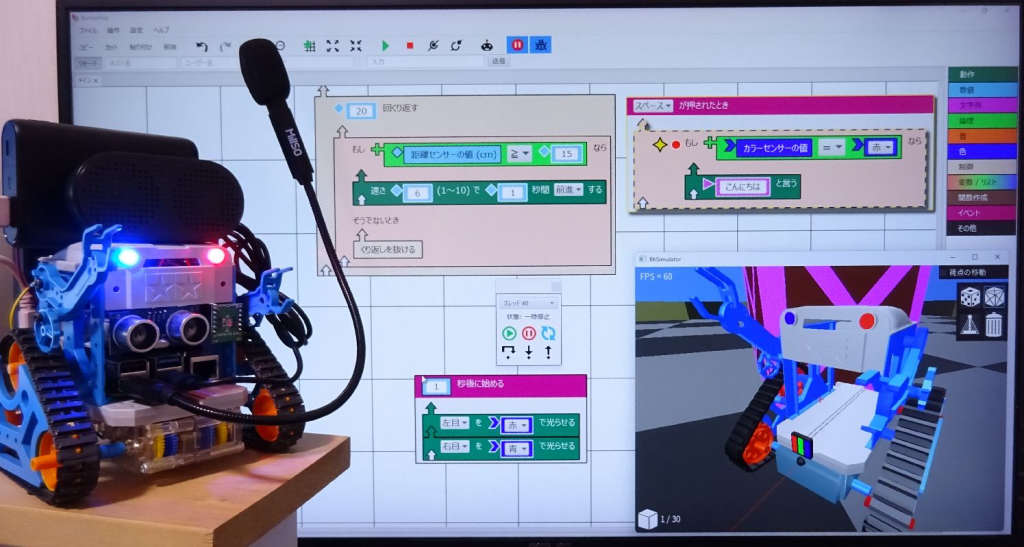 ブロックつないでプログラミング ~ラズパイロボを制御しよう~
ブロックつないでプログラミング ~ラズパイロボを制御しよう~
-
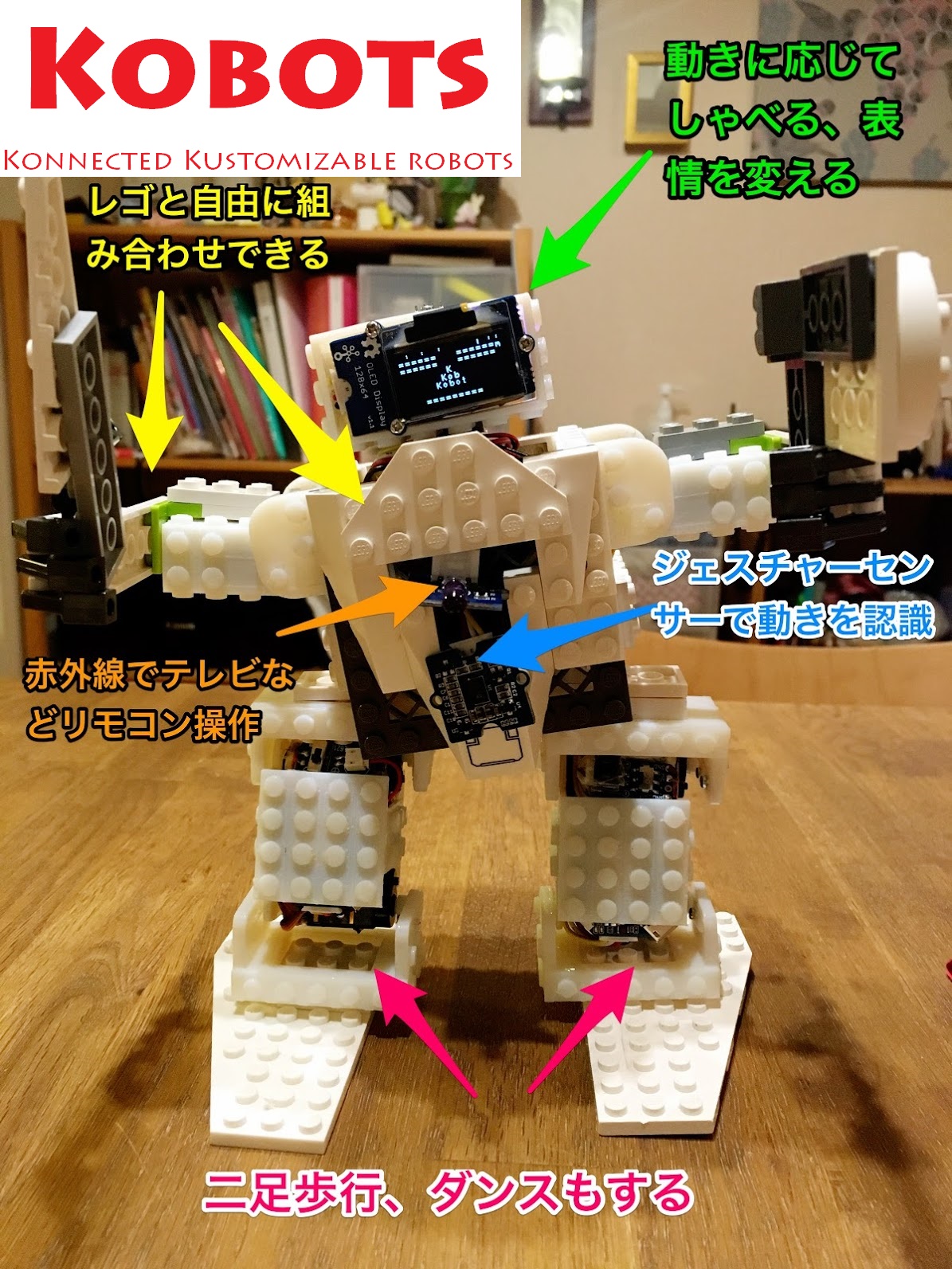 Kobots コネクト・カスタマイズ・ロボット
Kobots コネクト・カスタマイズ・ロボット
-
Proto lovers ♥