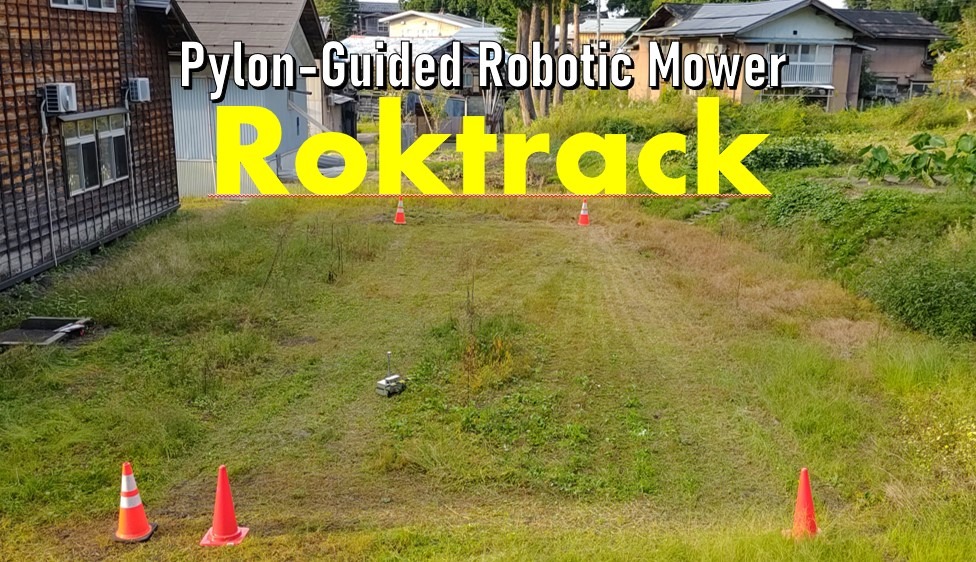
パイロン誘導草刈機 ー Roktrack Mower(ロックトラック モワー)
完成
© CC BY 4+
10739
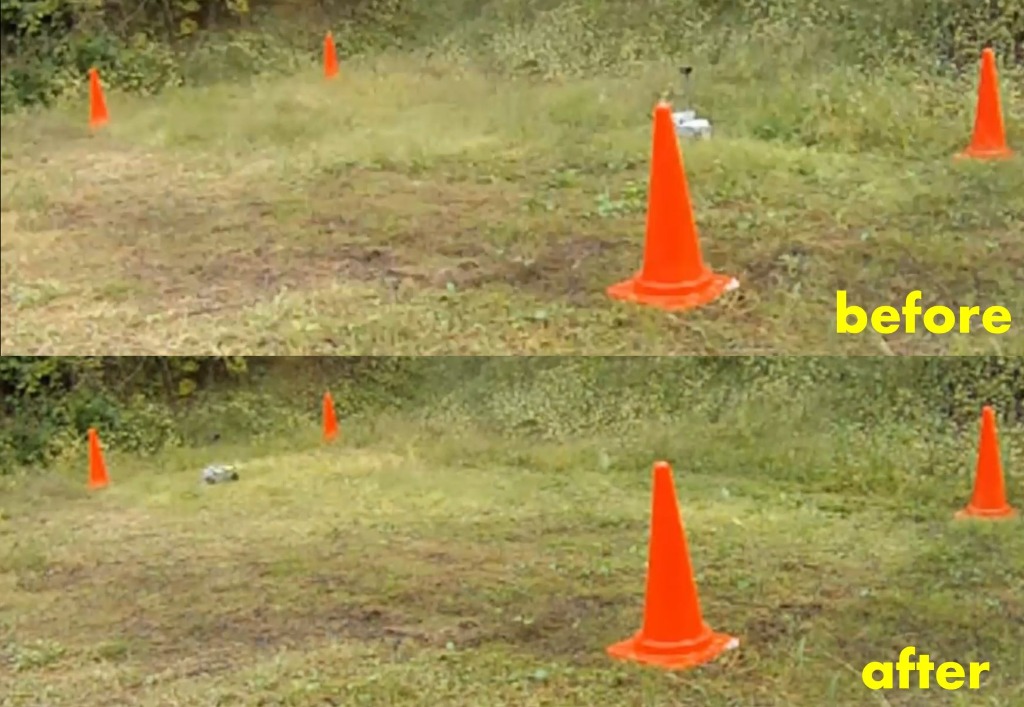
草を刈りたい場所をカラーコーンで囲みスイッチを入れるだけで草刈り出来るロボット草刈り機。
-
 Let's Play Android賞 by 日本Androidの会ヒーローズ・リーグ 2022
Let's Play Android賞 by 日本Androidの会ヒーローズ・リーグ 2022
-
ココロワ賞 by 竹内 稔ヒーローズ・リーグ 2022
-
ふるふる賞 by t_furuヒーローズ・リーグ 2022


- 動画
-
- 開発素材
-
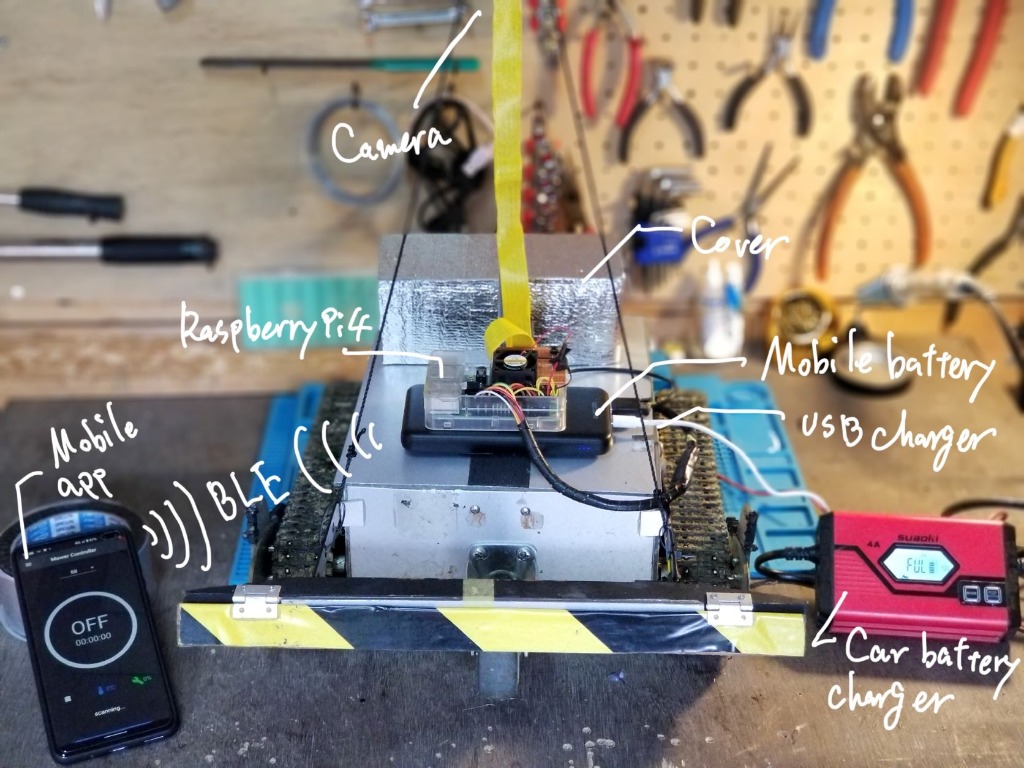
- システム構成
-
- ストーリー
-
- メンバー
-
Roktrack(ロックトラック)
-
- ysuito @ysuito
-
- Developer
- Planner
- engineer
-
- 関連イベント
-
-
 ヒーローズ・リーグ 20222022-09-05 開催
ヒーローズ・リーグ 20222022-09-05 開催
-
 【参加無料】DIYなデジタルガジェットであそぼ2 in 那須2024-10-20 開催
【参加無料】DIYなデジタルガジェットであそぼ2 in 那須2024-10-20 開催
-
- 関連リンク
-

- 同じニオイがする作品
-
-
 歩行リハビリエンタメシステム Melody Shoes
歩行リハビリエンタメシステム Melody Shoes
-
 画面ライダー
画面ライダー
-
 opniz
opniz
-
 来客センサー(二代目)
来客センサー(二代目)
-
Proto lovers ♥




























パイロンを設置するだけで草刈りができる手軽さが良いです。Androidとデバイス連携は、Androidの可能性を広げてくれました。草刈りの状況確認アプリはFlutterで開発されていて、今後のAndroidとデバイス連携の新しい形として増えていくこと期待します。
私も含め多くが抱えている草刈という課題に対し使っている技術力も高く、また実際に使用しながら課題を解決していく課程も
素晴らしい作品でした。
特に操作性についてスマホで草刈範囲を指定する方法から、パイロンを置いて範囲を指定するように変えていった所は
まさに現場で使ってみてならではの解決策で共感しました。
さらなる改良と発展に期待してます!
田舎生まれなので 草刈り大変さが少しわかります、自分の悩みをうまくアイデアと技術で解決していてすごいなと感動したので 個人賞 を送ります。
パイロン 認識して 旋回タイミングを早める 部分を ユニット化して市販芝刈り機につけたりできると すごく便利そうとか思いました、更なる発展を期待して応援してます!